双目立体视觉:精准三维目标定位技术
需积分: 30 195 浏览量
更新于2024-09-08
6
收藏 1.35MB PDF 举报
本文主要探讨了"基于双目立体视觉的目标定位"这一主题,随着"中国2025"战略的实施,现代制造业对机器视觉技术的需求日益增长,其中双目立体视觉因其在三维空间信息处理上的显著优势而受到重视。双目视觉系统利用视差原理,能够提供精确的深度信息,这对于自动化生产中的物体检测、定位以及机器人操作等任务具有重要意义。
文章首先阐述了双目视觉相较于单目视觉在处理三维场景中的优越性,尤其是在精确测量和识别目标物体方面。作者陈小华和袁卫着重研究了如何在实际生产环境中,考虑到摄像机的径向畸变和切向畸变等因素,通过最小二乘法来获取相机之间的精确转换矩阵。最小二乘法作为一种优化算法,可以有效地消除由于镜头校准不准确导致的图像失真,从而提高定位精度。
摄像机标定是整个过程的关键步骤,它涉及到摄像头内部参数(如焦距、光心位置)的确定,以及外部参数(如姿态和相对位置)的估计。在本文中,通过对双目系统的深入分析,作者构建了一个实验平台,将双目视觉应用于机械手臂的实时目标抓取任务。通过实验验证,这种方法能够确保在实际应用中得到准确和有效的目标定位,对于工业自动化生产线上的物体跟踪、抓取和放置等环节具有很高的实用价值。
此外,文章还提到了关键词,包括双目立体视觉、摄像机标定、角点提取、最小二乘法和三维重建。角点提取是双目匹配中的重要步骤,通过提取图像中的特征点,可以计算出目标物体的三维坐标;而最小二乘法则用于优化这些点的匹配,使得重建的三维模型尽可能接近真实世界。三维重建则是双目视觉系统输出的核心,它能复原出目标物体在三维空间中的完整形状,为自动化流程中的决策和控制提供了关键数据。
这篇论文不仅介绍了双目立体视觉理论在目标定位中的应用,而且还通过实验验证了其在实际工业场景中的可行性。对于那些关注智能制造和机器视觉技术的人来说,这篇文章提供了宝贵的理论基础和实践案例,有助于推动相关领域的发展和应用。
|
Techniques of Automation & Applications
102
《自动化技术与应用》 2017 年第 36 卷第 12 期
模式识别与仿真
Pattern Recognition and Simulation
基于双目立体视觉的目标定位
陈小华 , 袁 卫
( 苏州博众精工科技有限公司 , 江苏 苏州 215000)
摘 要:
随着“中国 2025”的提出 , 现代化的生产中机器视觉发挥着越来越重要的作用。基于视差原理的双目视觉具有定位三维
空间信息的能力 , 在处理生产中的三维信息时比单目视觉具有更大的优势。为了更加准确的获得目标物体和成像图形的转
换关系 , 本文在考虑镜头径向畸变和切向畸变的情况下 , 选用最小二乘法获取转换矩阵对双目立体视觉系统进行研究 , 并
搭建实验平台使用机械手臂进行目标物体的实时抓取 , 实验结果验证了该方法的准确性和有效性。
关键词 :
双目立体视觉 ; 摄像机标定 ; 角点提取 ; 最小二乘法 ; 三维重建
中图分类号 :TP391 文献标识码 :B 文章编号 :1003-7241(2017)12-0102-04
Object location Based on the Binocular Stereo Vision
CHEN Xiao-hua, YUAN Wei
( Bozhong Precision Industry Technology Co., Ltd., Suzhou 215000 China )
Abstract: With the announcement of the " Made in China 2025 " plan, machine vision plays more and more important roles in
modern manufacturing, binocular vision, basing on the binocular parallax theory, can locate 3-D position, and has more
advantage than monocular vision in processing 3-D information. With the consideration of radial distortion and tangential
distortion, this paper studies the binocular vision system by the least square method to get the accurate conversion relation
between the aim object and the imagery gure. The experimental system platform using robot to grasp objects in real time
is constructed, and the result verify the accuracy and effectiveness of this method.
Key words: binocular stereo vision; camera calibration; corner extraction; least square method; three-dimensional reconstruction
收稿日期 :2016-07-18
1 引言
随着计算机技术 , 数字图像处理 , 计算机图像学 , 人
工智能等学科的发展 , 视觉的应用越来越广泛。结合机械
手臂的机器视觉在自动化生产中起着重要的作用 , 机器视
觉正成为提高生产效率和产品质量检测的关键技术之一。
双目立体视觉是机器视觉的一个重要分支 , 它是基
于视差原理并利用成像设备从不同的位置获取两幅图
片 , 然后通过计算两幅图像中对应点的位置偏差获取目
标物体的三维位置信息。
双目视觉系统应用中的关键环节是相机的标定 , 如
何快速、准确的找出世界坐标系到像素坐标系的转换关
系是双目立体视觉的研究重点。本文在采用 OpenCV 搜
索出棋盘格亚像素点坐标的基础上 , 选取若干组对应的
角点坐标和世界坐标利用最小二乘法计算坐标系转换矩
阵 , 使用双目相机交点确定三维重建时目标点位置。
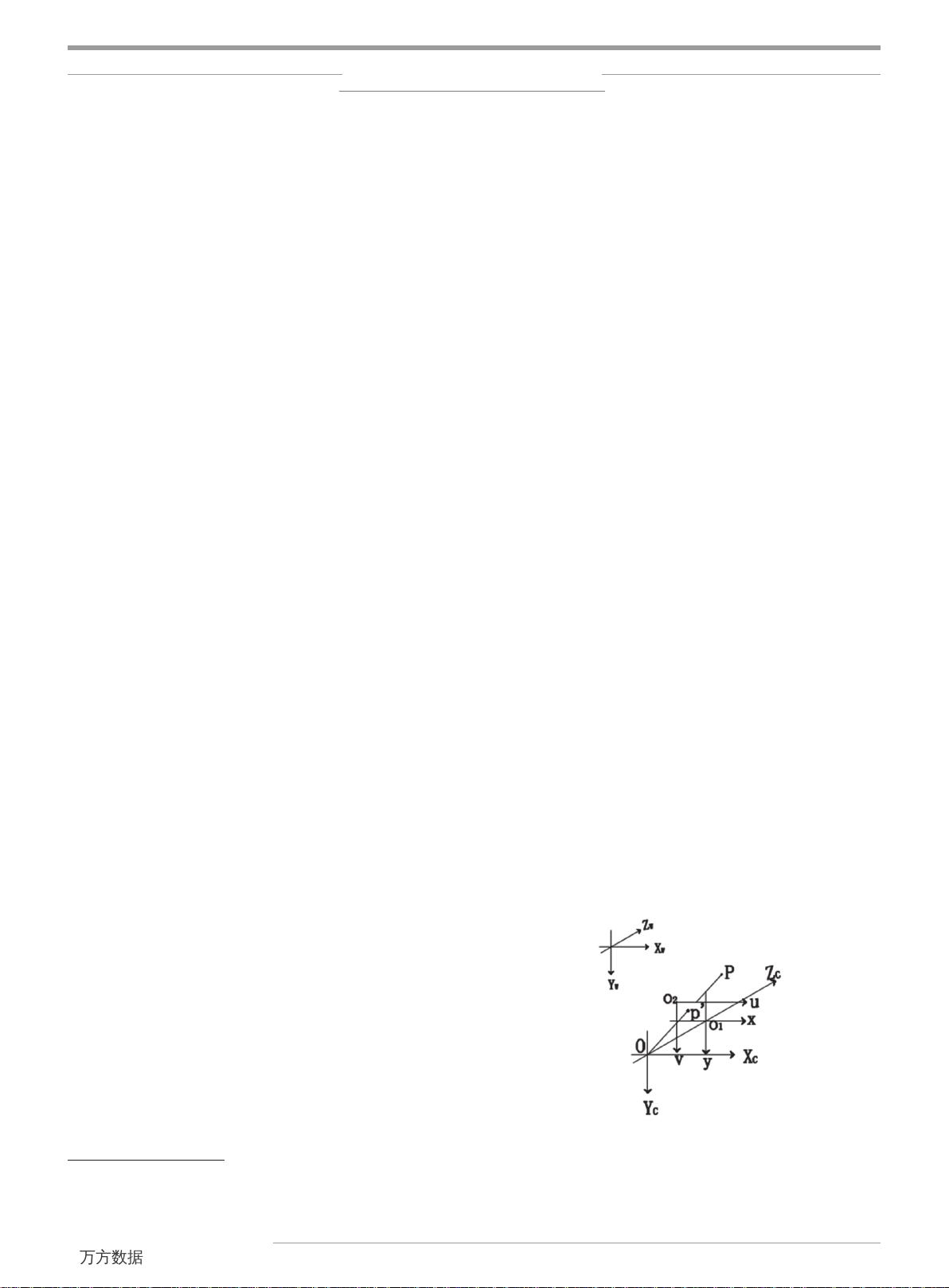
2 针孔模型
图 1 针孔模型
摄像机采集到的视觉信息是二维的平面信息 , 要根
据此二维信息获取空间坐标的相关信息 , 需要建立世界
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载
432 浏览量
285 浏览量
102 浏览量
261 浏览量
285 浏览量
146 浏览量

豆腐不打烊
- 粉丝: 7
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实验6,c语言编程修改编译器源码,c语言
- 最漂亮的LED花朵,一朵永远盛开的机械郁金香-电路方案
- org.eclipse.jgit.pgm-3.2.0.0.2-UNOFFICIAL-ROBERTO-RELEASE.zip
- adminli
- 简单平衡车代码.zip
- furima-34554
- org.eclipse.jgit.pgm-3.2.0.0.2-UNOFFICIAL-ROBERTO-RELEASE.zip
- smartcat-serge-sync-plugin:Smartcat平台的持续本地化解决方案
- Adithya2008-C-29-pro-2
- 8.3 使用注册表-----
- 老外开发项目—STM32F429设计的mini示波器源代码共享-电路方案
- automatic_bicycle:自主自行车算法
- grib-rs:用于Rust的GRIB格式解析器
- ProjetoCalculadora:用JavaScript制作的简单计算器
- 基于HTML实现的儿童乐园蓝色可爱的小学网站模板5589(css+html+js+图样).zip
- sew 31c系列变频器说明 PPT.rar
