




飞行模拟机自动驾驶控制系统设计与仿真
需积分: 0 126 浏览量
更新于2024-07-25
1
收藏 1.62MB PDF 举报
"这篇硕士学位论文主要探讨了自动驾驶仪在飞行模拟机中的应用,重点在于自动驾驶系统的控制律设计,包括姿态控制、轨迹控制、自动油门速度控制以及航空电子设备的交互,旨在实现飞行模拟机的多功能自动飞行控制。通过理论推导、系统辨识和MATLAB软件仿真,设计并验证了俯仰、横滚、自动油门和配平等模块的控制律,同时也详细介绍了飞行方式控制面板(MCP)的功能及其在实际飞行中的应用。"
在自动驾驶仪的工作原理中,它主要负责维持飞机的稳定飞行和自主导航。自动驾驶仪通常由传感器、控制器和执行机构组成。传感器收集飞机的各种状态数据,如航向、速度、高度和姿态等;控制器基于这些数据计算出所需的控制输入;执行机构则按照控制器的指令调整飞机的舵面或发动机推力,以实现预定的飞行任务。
这篇论文详细阐述了自动驾驶仪在飞行模拟机中的应用,首先,飞机的姿态控制涉及到俯仰、横滚和偏航三个维度,通过控制律设计确保飞机在三维空间中的稳定。俯仰控制律模块专注于飞机的升降动作,而横滚控制律模块则关乎飞机左右倾斜。自动油门系统则负责调节发动机功率,保持或改变飞机的速度。
轨迹控制是自动驾驶仪的另一个关键功能,它确保飞机沿着预设的航线或航点飞行。这需要精确的导航数据和灵活的飞行计划管理。航空电子设备的交联使得各系统之间能够协同工作,提供飞行控制的全面支持。
在系统辨识过程中,通过频域分析法和根轨迹法,可以理解和优化控制律的动态特性,确保其在各种飞行条件下都能有效工作。MATLAB软件的仿真验证进一步确认了这些控制律的性能,模拟了真实飞机自动飞行时的控制效果。
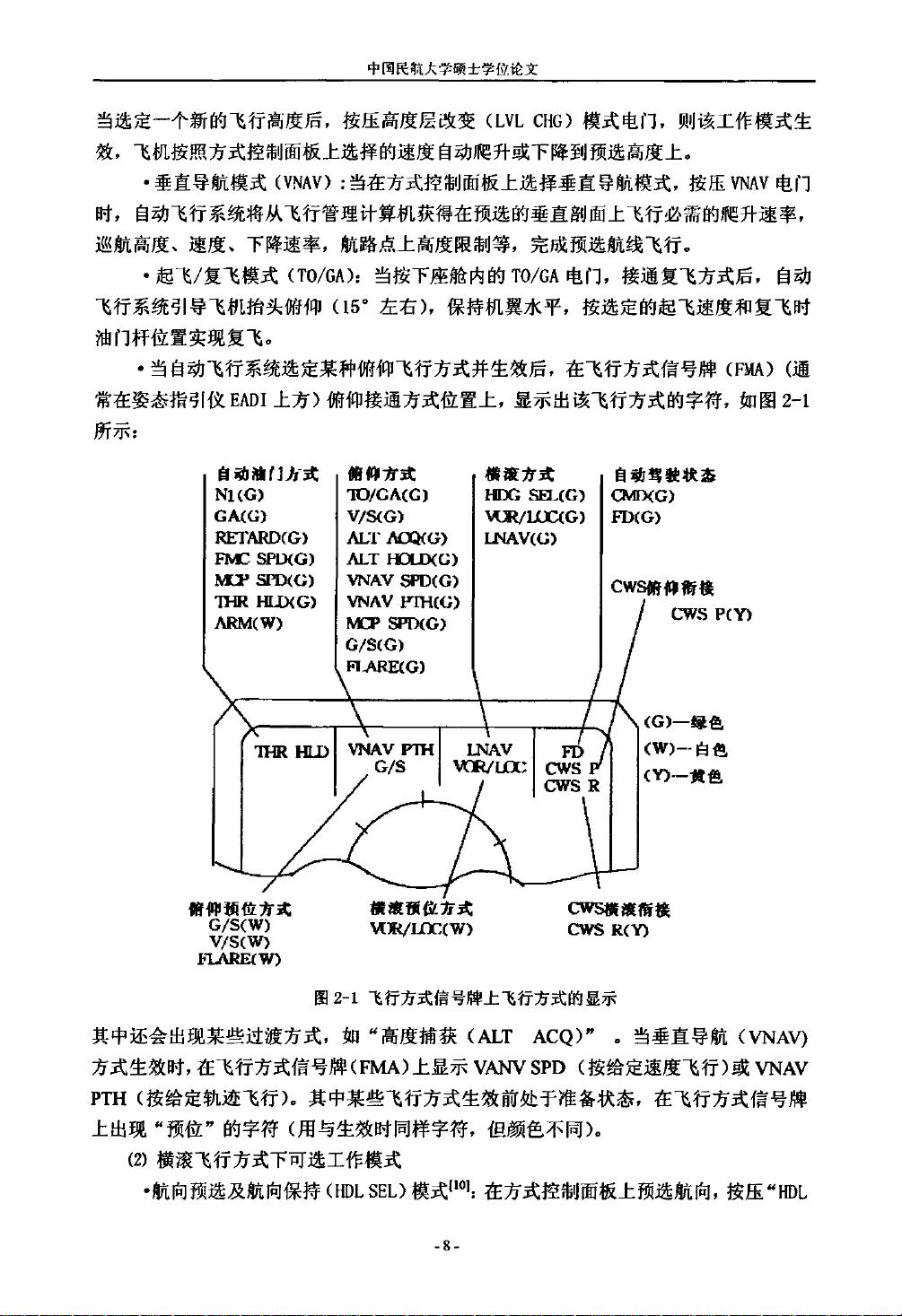
最后,论文提到了飞行方式控制面板(MCP),这是飞行员与自动驾驶仪交互的主要界面。MCP允许飞行员选择不同的飞行模式,如航向保持、高度保持、速度保持等,从而实现对飞机自动化操作的精细控制。
这篇论文深入研究了飞行模拟机的自动驾驶控制系统,不仅涵盖了理论设计,还涉及实际应用,对于理解自动驾驶仪的工作原理和在飞行训练中的作用具有重要意义。
中国R抗大学硕士学位论文
第二章自动飞行系统仿真方法概述
2.1自动飞行系统组成及原理简介
自动飞行系统由以下几部分组成:
I.飞行指引系统(F/D))
2.自动驾驶仪系统(A/P);
3.自动油门系统(A/T);
4.飞行方式控制面板(MCP);
飞行指引系统及自动驾驶仪系统的功能,在飞机上通常由飞行控制计算机(FCC)
来完成。实现各种飞行方式的逻辑转换、控制率计算,并输出俯仰及横滚控制指令。当
仅接通飞行指引系统而自动驾驶仪系统不工作时,飞行指引系统的俯仰及横滚通道根据
选择飞行方式和飞机当前的纵侧向飞行参数,按照相应的控制律计算出飞机的俯仰角和
滚转角指令信号,在飞行指引仪(EADI)上通过指令杆指示,并显示出与飞机当前实际
俯仰角和滚转角的差值,引导驾驶员操纵升降舵和副翼,使飞机的实际姿态角跟踪指令
杆指示姿态角,从而实现预选的飞行方式。
当飞行指引系统与自动驾驶仪同时接通时(自动驾驶仪通常在飞行高度为152m以
上接通),还根据自动驾驶仪的控制律,计算出升降舵和副翼自动偏转,操纵飞机按照
指令杆的指令改变俯仰角或滚转角。飞行员所选定的导航方式,导航参数均可在水平状
态指示仪(EHSI)上显示。在上述两种工作模式下,若接通自动油门系统,则自动油门
系统将工作在与选定俯仰方式协调一致的模式下,给出油门杆驱动信号,使油门杆位置
自动调整到保证发动机推力处于最佳配置状态。飞行方式控制面板(McP)提供由飞行
员操作的(F/D),(A/T),(A/P)的通断开关,各种飞行方式的接通电门、飞行高度、
速度、垂直速度、航向、航道预选按钮及数字显示窗、指示灯等。若飞行方式选择在“垂
直导航(VNAV)”或“横向导航(LNAV)”方式,则由飞行管理计算机(FMc)提供飞机
垂直飞行剖面有关参数和航向、航道等指令信号。
2.2自动飞行系统的仿真方法及特点
I.自动飞行系统的仿真方法
(1)自动飞行系统内各模块问的信息交换,通过本地公共数据区实现,自动飞行系统
与其它分系统间的信息交换通过全局公共数据区传递。
(2)飞行方式控制面板的外观应与真实设备一致。各种信息的输入、输出可通过常规
接口与仿真计算机连接。与飞行管理计算机的信息交换可采用串行口或网络来实
剩余58页未读,继续阅读
453 浏览量
201 浏览量
381 浏览量
453 浏览量
212 浏览量
403 浏览量
2021-09-20 上传
154 浏览量

u010336479
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开








最新资源
- MVC三层架构入门实例解析及源码下载
- Lua语言与Nuklear图形用户界面库的绑定
- iPhone/iOS平台下的Visual C++音乐应用开发教程
- 基于RSSI的滤波技术代码实现与分析
- Java课程设计:铁路售票系统的软件与测试文档
- 捕鱼达人Java程序开发及源码解析
- 图形图像处理基础学习工具:Tjishibenh
- 探索cpdetector:Java文件编码检测的开源解决方案
- 《精通J2EE网络编程》源代码分享
- 全面掌握ASP.NET技术:40份核心文档解析
- STM32超声波测距开发教程与代码解析
- MyBatis SQL映射文件详解及resultMap应用
- 卡巴斯基无限试用工具升级版1.5,支持多版本并简化操作
- 基于多进程和共享内存的C语言聊天室实现
- JFreeChart在Java中的应用及其开源jar包
- 文本替换专家2.5:适用于私服维护的高效工具






















