山东大学崇新学堂EECS实验:机器人状态机与传感器应用
需积分: 0 77 浏览量
更新于2024-08-03
收藏 1.07MB DOCX 举报
"该资源是山东大学崇新学堂EECSdesignlab2的相关实验教程,主要涉及使用状态机控制实物机器、研究6.01课程机器人上的实际距离传感器(如超声波传感器)以及构建能够完成特定任务(如沿边界行走)的状态机。实验分为环境配置与平台建设、简单大脑构建等步骤,并使用Python 2.6.6进行编程,通过soar.py启动汽车模拟平台,编写brain.py实现对汽车驾驶需求的定制。硬件平台上需要机器人、串行电缆和串口转USB适配器等设备。"
在本次实验中,学生将深入学习如何运用状态机理论来控制实体机器。状态机是一种强大的工具,它允许我们定义一系列有序的状态,并根据外部输入或内部条件来切换这些状态,以此来实现复杂的行为。在控制机器人时,状态机可以帮助设计出逻辑清晰且易于维护的控制策略。
实验的第一步是环境配置和相关平台的建立。选用Python 2.6.6作为编程语言是因为它与课程先前使用的软件和库兼容性较好。运行soar.py启动的是一个汽车模拟平台,它可以让学生在虚拟环境中测试和调试他们的算法。同时,需要编写自己的`brain.py`文件,覆盖代码中的`getNextValues`方法,以满足不同驾驶场景的需求。
硬件方面,实验需要用到一个机器人,一条长的灰色串行电缆,以及一条短的蓝色串口转USB适配器。这些设备用于连接和控制机器人,使其能够在指令下执行任务。超声波传感器是实现机器人感知环境的关键组件,它们能测量与障碍物的距离,帮助机器人做出避障或导航决策。
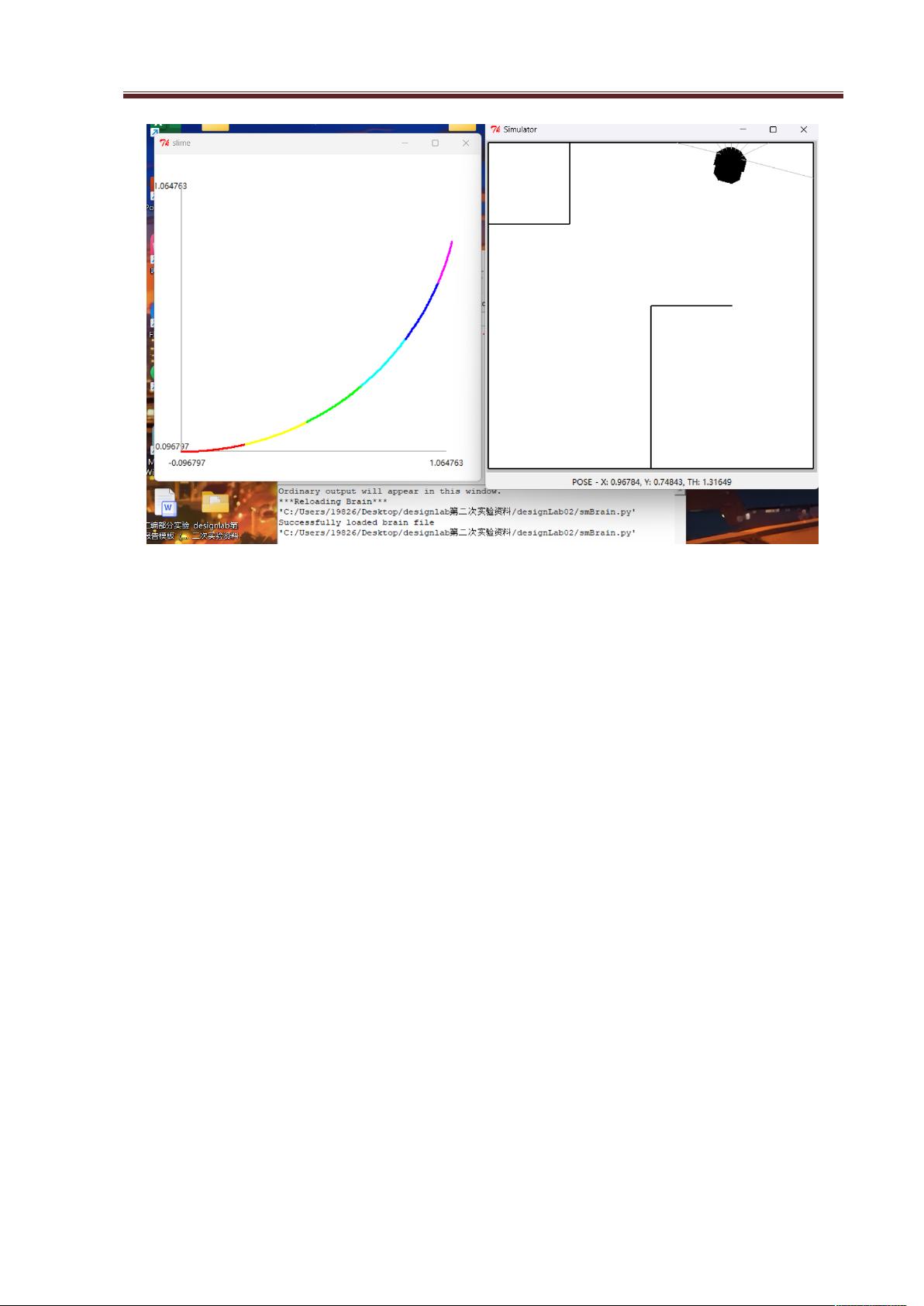
实验的第二部分是构建简单的“大脑”。目标是为机器人创建一个基于状态机的控制器,首先在模拟器中测试,然后实现在真实机器人上。运行一个简单的状态机大脑,并记录机器人在模拟器中的行驶路径。通过对这个简单大脑的修改,可以逐步实现更复杂的任务,例如让机器人沿着边界行走。
这个实验旨在提升学生的实践能力,加深对状态机控制逻辑的理解,并掌握使用Python编程和机器人硬件交互的方法。通过这样的动手实践,学生不仅能够掌握理论知识,还能锻炼解决问题和创新思维的能力。
山东大学·崇新学堂·实验报告
- 3 -
Figure2 slime trail
2. Modify the brain and run it.
a. In the Terminal window, type idle & to open up an Idle environment.
b. Click Idle’s File menu, select Open..., navigate to Desktop/6.01/designLab02/smBrain.py,
and click Open.
c. The state machine that controls the robot’s actions is defined by the MySMClass definition.
Think of this state machine as taking sensory data as input, and returning as output instructions
to the robot on how to behave. The io.Action object returned as the output by
the getNextValues method of the MySmClass tells the robot how to change its behavior,
and has two attributes that are important to us:
* fvel: specifies the forward velocity of the robot (in meters per second)
* rvel: specifies the rotational velocity of the robot (in radians per second), where positive
rotation is counterclockwise
d. Find the place where the velocities are set in the brain, and then modify it so that it makes
the simulated robot rotate in place.
e. Save the file.
f. Go back to the soar window and click the Reload Brain button
剩余12页未读,继续阅读
2024-01-25 上传
2024-01-25 上传
2023-09-12 上传
2023-07-02 上传
2024-04-29 上传
2023-07-13 上传
2023-12-14 上传
2023-07-27 上传
2023-08-29 上传
2023-05-26 上传


Jaspin.
- 粉丝: 19
- 资源: 42
 我的内容管理
展开
我的内容管理
展开







最新资源
- Postman安装与功能详解:适用于API测试与HTTP请求
- Dart打造简易Web服务器教程:simple-server-dart
- FFmpeg 4.4 快速搭建与环境变量配置教程
- 牛顿井在围棋中的应用:利用牛顿多项式求根技术
- SpringBoot结合MySQL实现MQTT消息持久化教程
- C语言实现水仙花数输出方法详解
- Avatar_Utils库1.0.10版本发布,Python开发者必备工具
- Python爬虫实现漫画榜单数据处理与可视化分析
- 解压缩教材程序文件的正确方法
- 快速搭建Spring Boot Web项目实战指南
- Avatar Utils 1.8.1 工具包的安装与使用指南
- GatewayWorker扩展包压缩文件的下载与使用指南
- 实现饮食目标的开源Visual Basic编码程序
- 打造个性化O'RLY动物封面生成器
- Avatar_Utils库打包文件安装与使用指南
- Python端口扫描工具的设计与实现要点解析
