5R-P机构MATLAB/Simulink运动学仿真:快速简便的参数优化工具
153 浏览量
更新于2024-09-04
收藏 282KB PDF 举报
本文主要探讨了基于MATLAB/Simulink的5R-P机构运动学数字仿真技术。作者黄康、许志伟和倪国华在合肥工业大学机械与汽车工程学院开展的研究中,针对某具体压力机增力装置采用了一种创新的仿真方法。他们首先构建了5R-P机构的数学模型,这是一种由两个串联的四杆机构组成,其中包含五个转动副和一个移动副的复杂机构。这种机构的关键特征是曲柄AB作为原动件,其与滑块的运动关系在设计时特别考虑了转动副的位置和角度。
在仿真过程中,作者利用MATLAB强大的数学计算能力和Simulink的动态系统建模工具,创建了一个直观易用的仿真模块。通过这种方法,可以方便地模拟机构中移动构件(如滑块)的位移、速度和加速度,以及转动构件的角位移、角速度和角加速度。这种方法的优势在于简化了传统的编程计算,提高了工作效率,同时提供了更好的可视化效果,便于参数调整和优化。
通过运动学仿真,研究人员能够深入理解机构的工作特性,这对于机械设计和评估机构的运动性能至关重要。压力机增力装置的六杆机构,尤其是5R-P结构,由于其独特的设计,能够在接近死点位置实现增力,这在实际应用中具有显著的价值。
文中还提到,MATLAB/Simulink以其易用性和灵活性在学术界和工业领域得到了广泛应用,尤其是在机械工程和自动化控制领域。通过这个平台,研究人员不仅可以进行运动学仿真,还能进一步进行动力学分析,为机械设计提供全面的支持。
这篇首发论文揭示了如何利用MATLAB/Simulink进行5R-P机构的运动学仿真,展示了这一技术在提高机构分析效率和精度方面的潜力,对于推动机构设计和优化具有重要的实践意义。
http://www.paper.edu.cn
基于 MATLAB/Simulink 的 5R-P 机构运动学数字仿真
黄康 许志伟 倪国华
(合肥工业大学机械与汽车工程学院,安徽 合肥 230009)
摘 要:建立了某 5R-P 机构运动学的数学模型,编制了相应的 M 函数仿真模块,并利用动
态仿真软件 MATLAB/Simulink 建立了运动学仿真模型,进行了运动学仿真。通过整个仿真过
程得出:该方法具有运算简单、速度快、方便直观的特点。与此同时,通过对仿真参数的修
改,可进行机构的参数优化。
关键词:运动学 Simulink 仿真研究
0 引 言
随着仿真技术的发展,对机构进行运动学仿真已变得越来越方便。机构的运动学分析,
主要获得机构中移动构件的位移、速度、加速度或转动构件的角位移、角速度、角加速度。
它是进行机械设计及评价机械运动和动力性能的基础
[1]
。对于机构的运动分析,过去一般采
用编程的方法进行计算,但是存在程序编写繁琐、可视化差、参数修改麻烦等缺点。而
MATLAB中的Simulink模块是一个用来对动态系统进行建模、仿真和分析的软件包,它功能
强大,使用方便,已经在学术和工业领域得到广泛的应用
[3][4]
。
机械式曲柄滑块压力机广泛应用于板料冲压、薄板拉伸等工艺中
[6]
,其增力装置一般采
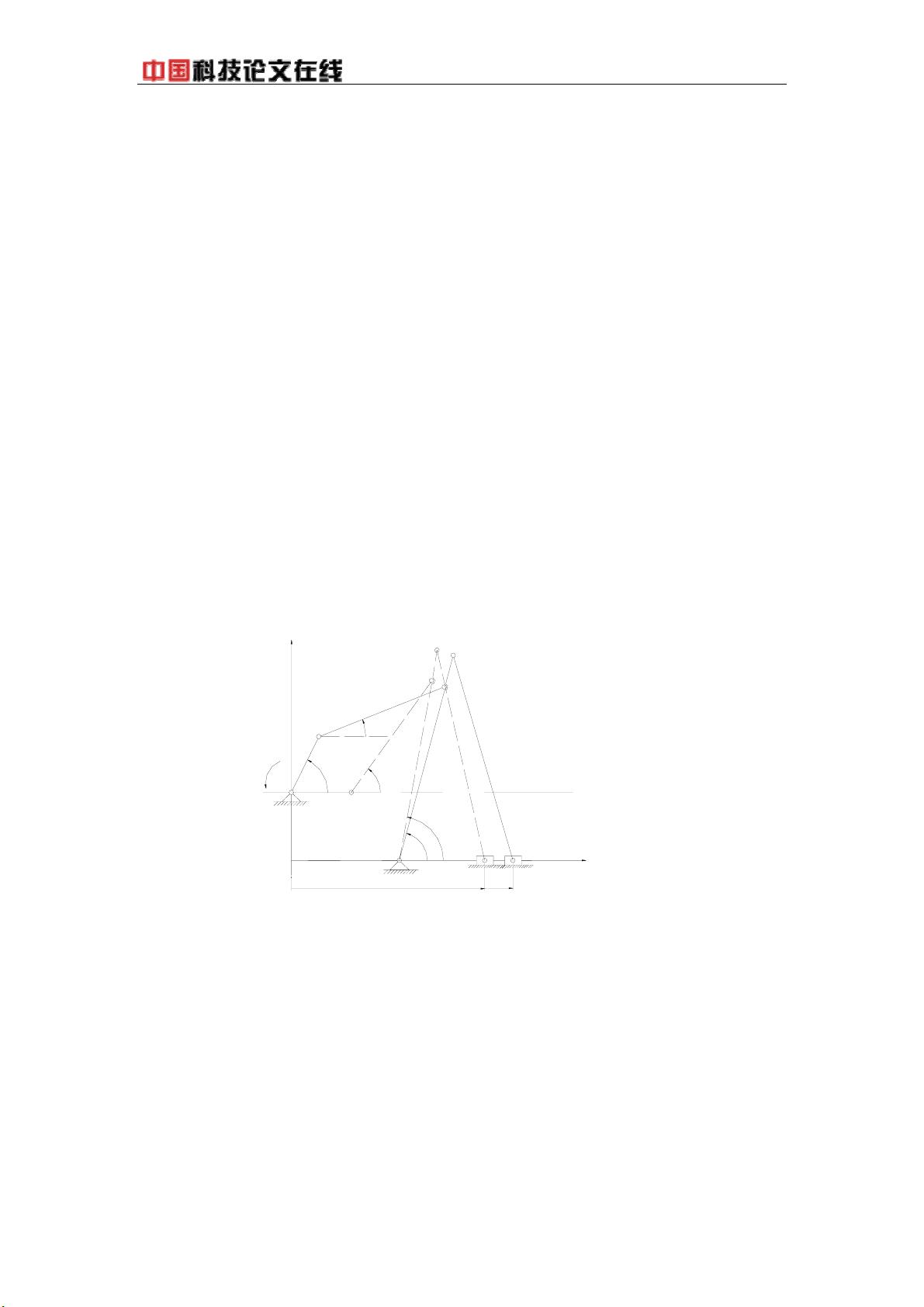
用六杆机构,工作原理是利用机构接近死点位置来达到增力的目的。图 1 为某压力机的增力
装置机构简图。
o
A
D
B1
y
B
F1
F
x
C1
C
E
1
E
1
θ
′′
ϕ
ω
1
θ
′
2
θ
′
2
θ
′
′
c
x
s
图 1 压力机增力装置机构简图
2 5R-P 机构运动学数学模型的建立
该压力机增力机构是一由两个四杆机构串联而成的六杆机构,前一级四杆机构为曲柄摇
杆机构,后一级为摇杆滑块机构。由于该机构中包括五个转动副
(
)
FEDCB ,,,,
和一个移动
副
,因此可简称为 5R-P机构
()
F
[2][5]
。曲柄
A
B 为原动件,转动副 与滑块在同一水平线上,
且
,各角度如图所示。将该机构置于直角坐标系 中,计算滑块的位置、位移
和构件
的角位移。
D
EFDE
ll =
XOY
DE
由图 1 可知
A
、 的位置是给定的,点 为研究点。建立机构的封闭向量方程
D F
-1-
下载后可阅读完整内容,剩余4页未读,立即下载
2527 浏览量
515 浏览量
2825 浏览量
2013 浏览量
401 浏览量
1551 浏览量

weixin_38593738
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- diskusage工具发现磁盘空间占用大户
- 易语言实现按钮滑动效果及延时优化技巧
- 易语言实现ASM取启动时间的核心源码
- PSCAD线路故障仿真模型:学习与模型搭建指南
- HTML压缩包子文件技术探讨
- Vagrant上部署LAPP环境示例教程
- Kubeflow 1.2.0版本文件压缩包介绍
- MATLAB实现的Crowding模型分析工具包
- zmote小部件PCB设计与制作教程:原理图与Gerber文件
- MATLAB多线主成分分析PCA代码实现与应用
- 全面技术项目源码共享:ASP+ACCESS即时查询系统
- zlib 1.2.11版本压缩包免费下载指南
- 华为交换机Web管理文件下载指南
- lttcpp-xls-数据集: 训练集文件解析与应用
- Jenkins-PHP Docker:轻松构建PHP环境的Docker模板
- Heka插件开发:解耦与指标集成的探索
