光电平衡小车的单片机控制设计与实现
版权申诉
"光电平衡小车设计_单片机课程设计"
这份文档是湖南大学电气与信息工程学院本科学生的单片机课程设计报告,主题为光电平衡小车的设计。该设计项目旨在利用单片机技术实现两轮自平衡小车的控制,通过光电传感器收集信息并进行智能处理,以保持小车的稳定行驶。
在第一章中,详细介绍了车模的整体设计方案。1.1部分阐述了两轮自平衡智能车的基本框架,强调了单片机MC9S12XS128在处理传感器数据和控制电机上的核心作用。1.2部分对直立行走任务进行了分解,将维持车模直立、前进和转向这三个关键任务拆分出来,以便于设计和控制。1.3至1.5部分分别讨论了这些任务的具体实现方法,包括直立控制、速度控制和方向控制。
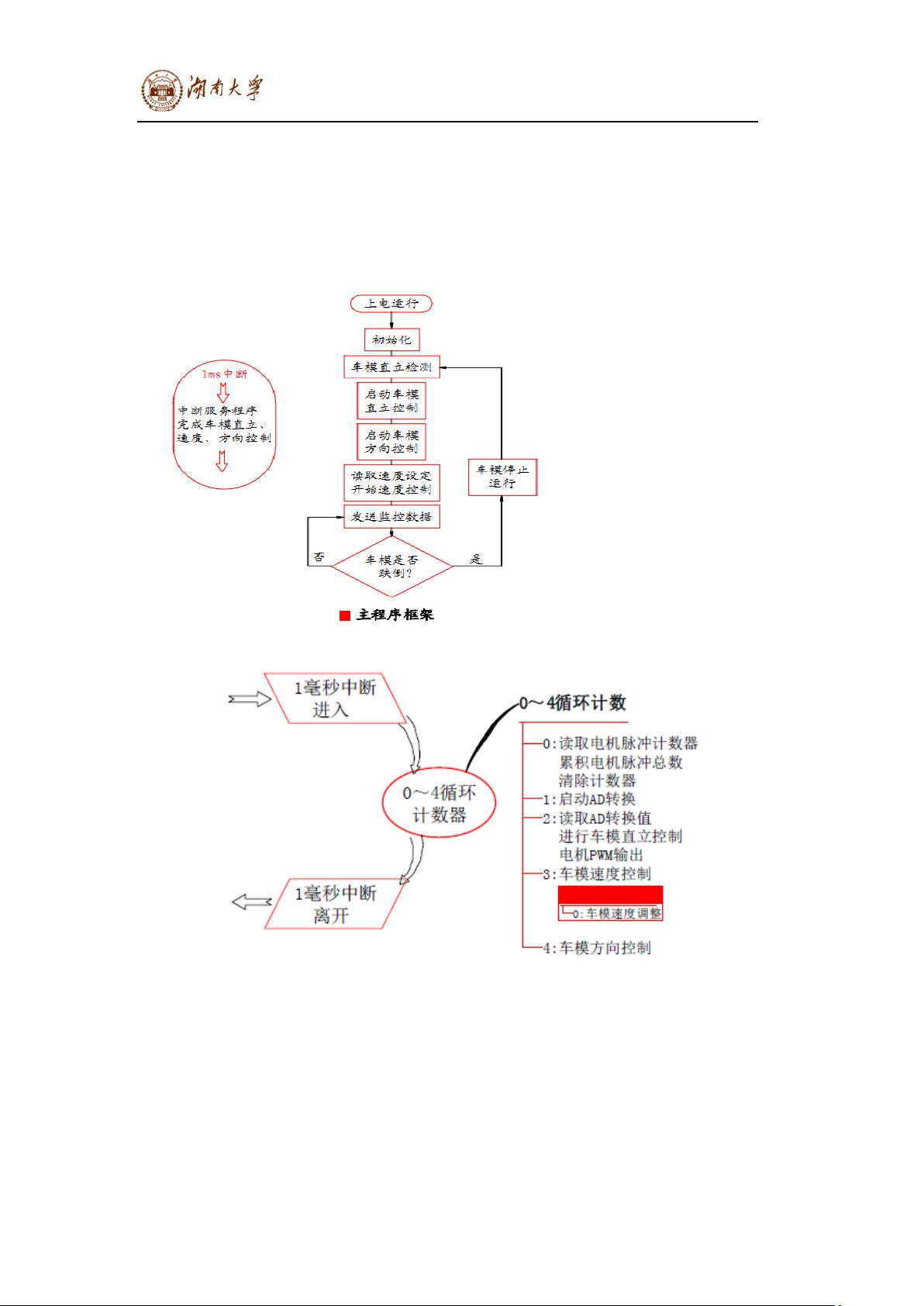
第二章主要涉及程序控制。11页提到了主程序框架,以及针对电机控制的优化策略,如6.1的电机死区补偿,以减少电机换向时的瞬间停顿,提高控制精度。12页开始探讨了不同类型的闭环控制,包括角度单闭环控制和角度、速度双闭环控制,这些控制策略是实现小车精确平衡和动态行驶的关键。
第三章聚焦于车模的机械设计,涵盖了车模底盘的安装、编码器的设置以及电池位置的改装,这些都是确保小车功能性和稳定性的重要方面。
第四章深入讲解了卡尔曼滤波的原理和应用。卡尔曼滤波是一种高级的数据平滑和预测算法,用于处理传感器数据中的噪声,提高信息的准确性。本章说明了为何选择使用卡尔曼滤波,以及它的基本结构、简化过程和参数整定方法。
第五章展示了车模参数调试图解,帮助理解系统性能调整的过程,并在附录中提供了源代码和硬件电路图,供读者进一步研究和参考。
最后,报告的个人总结部分可能是作者对整个设计过程的反思和学习心得,这部分未提供具体内容。这份报告详尽地介绍了光电平衡小车的设计思路和技术实现,为单片机控制和智能车辆领域的学习者提供了宝贵的参考资料。

本科生单片机课程设计报告
9
度;
2
k
决定了车模回到垂直位置的阻尼系数,选取合适的阻尼系数可以保证车
模尽快稳定在垂直位置。
因此控制车模稳定,需要下列两个条件:
(1)能够精确测量车模倾角的大小和角速度的大小;
(2)可以控制车轮的加速度。
1.4 车模速度控制
车模运行速度是通过控制车轮速度实现的,车轮通过车模两个后轮电机经由
减速齿轮箱驱动,因此通过控制电机转速可以实现对车轮的运动控制。
电机的运动控制有三个作用:
(1) 通过电机加速度控制实现车模直立稳定。
(2)通过电机速度控制,实现车模恒速运行和静止。虽然本届比赛规则中没有
要求车模速度恒定,也没有要求车模在比赛之前和冲过终点之后保持静止状态。
但是通过速度控制,可以提高车模稳定性。在将来的比赛中,如果规则增加了静
止要求,或者需要通过路桥等障碍,速度控制将会发挥作用。
(3)通过电机差速控制,可以实现车模方向控制。电机运动控制是通过改变施
加在其上的驱动电压实现的。对于电机的电磁模型、动力学模型以及车模的动力
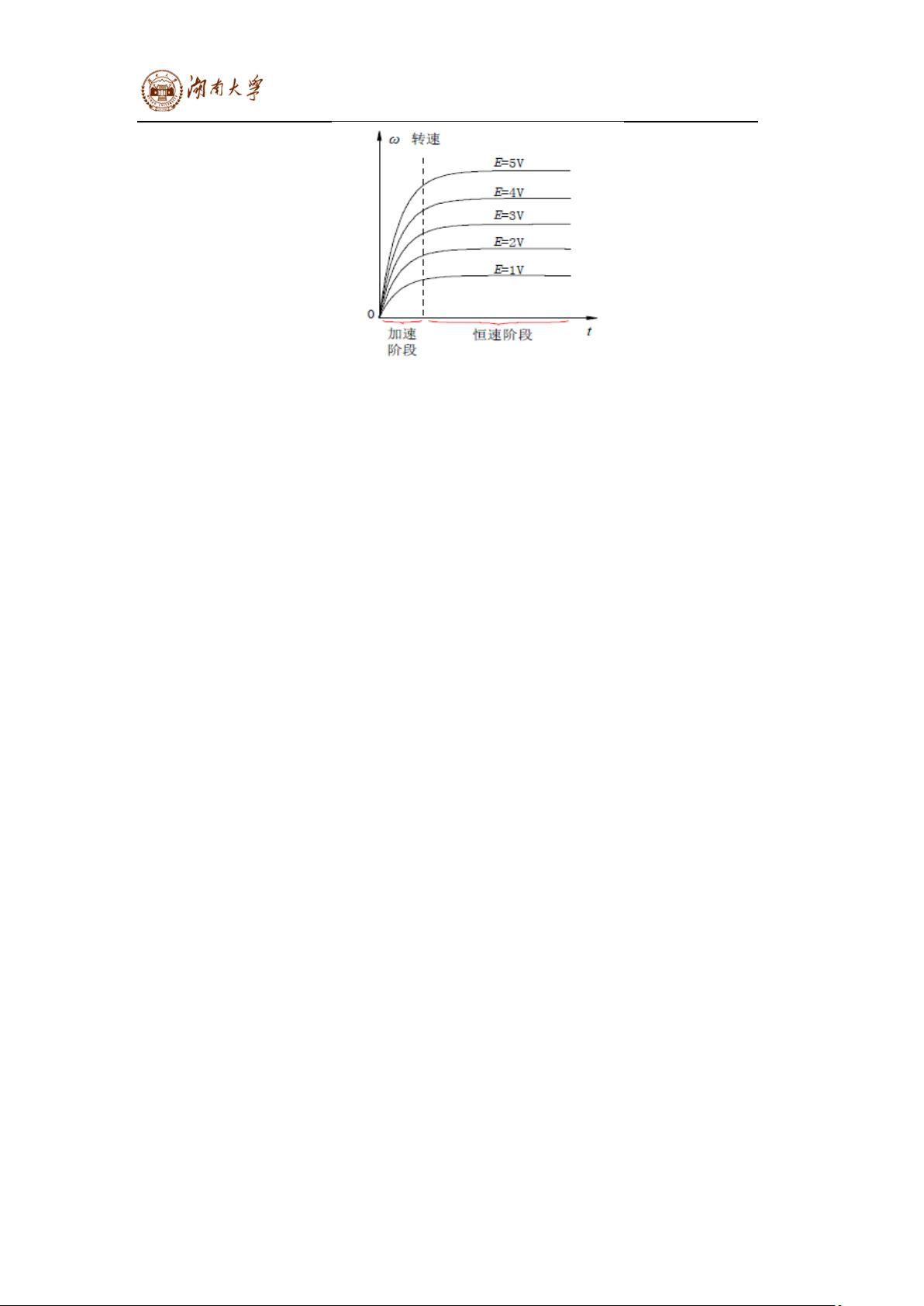
学模型进行分析和简化,可以将电机运动模型简化成如下的一阶惯性环节模型。
施加在电机上一个阶跃电压
( )
Eu t
,电机的速度变化曲线为
�
( ) ( )
w
æ ö
ç ÷
= · -
ç ÷
è ø
1
1
t
T
m
t E k e u t
(2-4)
式中,E为电压;
( )
u t
为单位阶跃函数;
1
T
为惯性环节时间常数;
mk
为电机
转速常数。
对应不同的电压,电机的速度变化曲线如图2.9示。
剩余50页未读,继续阅读
2021-10-02 上传
2012-02-15 上传
2022-07-03 上传
2022-06-30 上传
2021-04-06 上传
2021-10-02 上传
2022-07-03 上传
2024-05-10 上传
2022-06-30 上传

omyligaga
- 粉丝: 72
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
