超低功耗13位6.4 MS/s SAR ADC:背景不匹配与偏置校准技术
需积分: 50 118 浏览量
更新于2024-09-10
收藏 3.85MB PDF 举报
"A 46 μW 13 b 6.4 MS/s SAR ADC With Background Mismatch and Offset Calibration"
这篇论文介绍了一种低功耗、高分辨率的模数转换器(ADC),具体来说,是一种采用逐次逼近寄存器(SAR)架构的ADC。该ADC具有出色的性能参数,其电源消耗仅为46微瓦(μW),能够实现13位的分辨率,并以6.4兆样本每秒(MS/s)的速度进行采样。这些特性使得它非常适合于能源受限的应用,例如无线传感器网络、物联网设备以及便携式电子设备。
在ADC设计中,失调和不匹配问题通常会影响转换精度。该论文提出的SAR ADC引入了背景校准技术来解决这些问题。背景校准是在不影响正常采样操作的同时,对电路中的失调电压和不匹配误差进行动态补偿,从而提高了ADC的线性度和整体性能。这种方法的关键在于能够在运行时自动调整,无需额外的外部控制信号或复杂的校准序列,降低了系统的复杂性和功耗。
论文中提到的几位作者,如M. Ding、Yao-Hong Liu、Benjamin Busze和K. Philips,他们在Imec Netherlands和Holst Centre等研究机构工作,这些机构在微电子和射频技术领域有着深厚的积累。他们的研究项目包括可植入RF收发器设计和生命体征检测雷达,这进一步证明了这款SAR ADC对于生物医学和健康监测应用的潜力。
此外,文章中提到的DOI(数字对象唯一标识符)10.1109/JSSC.2016.2609849表明,该研究成果已发表在《IEEE Journal of Solid-State Circuits》上,这是一个在集成电路领域非常权威的学术期刊。这意味着论文经过了同行评审,其科学性和技术价值得到了业界的认可。
这个46 μW 13位6.4 MS/s的SAR ADC展示了高效率与高精度的结合,其背景失调和不匹配校准技术是提高ADC性能的关键创新。这一技术在低功耗系统和高分辨率传感器应用中具有广泛的应用前景。
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
2 IEEE JOURNAL OF SOLID-STATE CIRCUITS
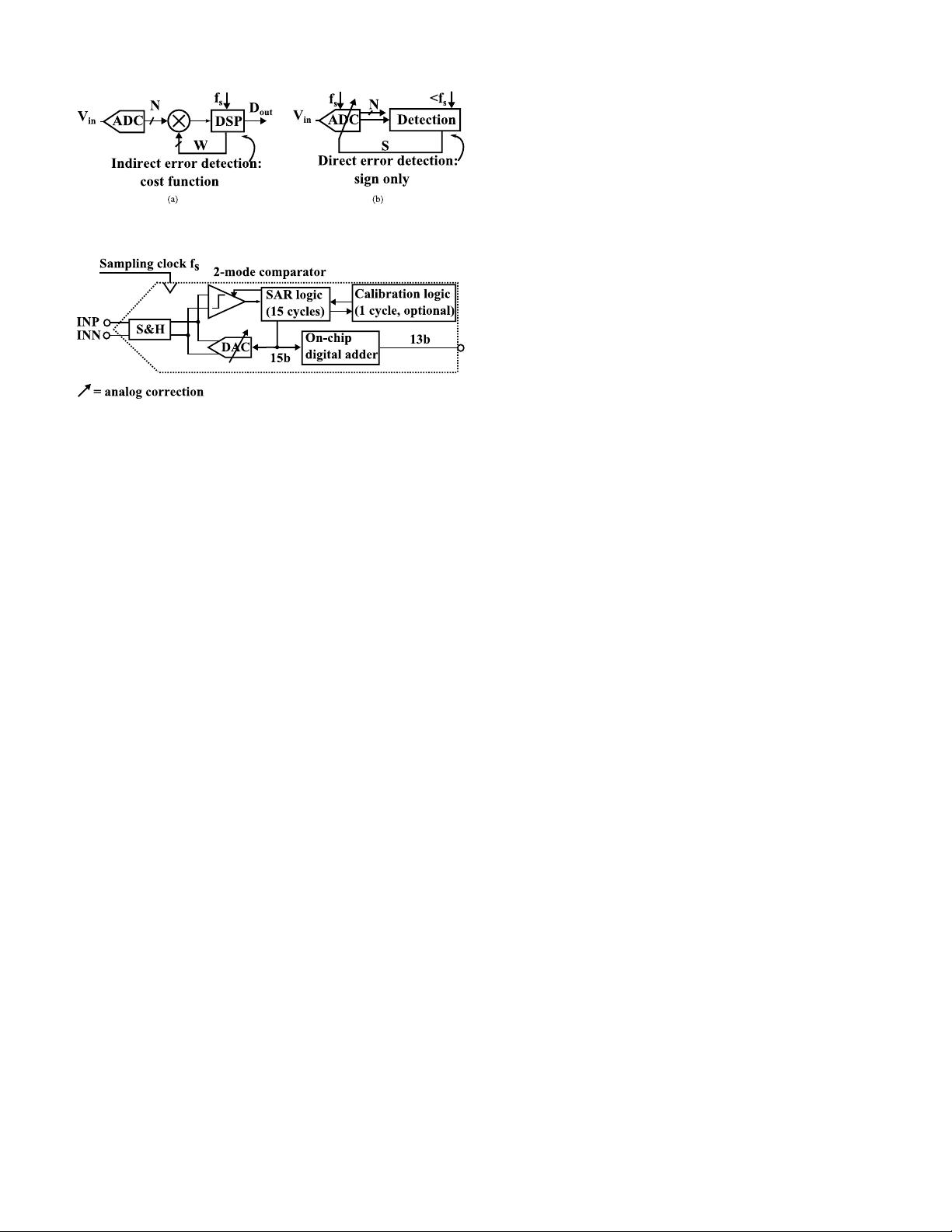
Fig. 1. (a) Block diagram of the prior arts’ calibration method and
(b) proposed calibration method for a N bit ADC.
Fig. 2. Block diagram of a 13 b SAR ADC.
In prior art, without knowing any information of the error,
often the circuit errors are corrected indirectly in a digital
fashion [2], [3], [10] via postprocessing. Fig. 1(a) shows the
block diagram of the calibration method in [2], [3], and [10].
Based on the ADC output data, a DSP engine can define a
cost function, which reflects the error. Through an adaptive
algorithm, e.g., LMS, the value of the cost function will
be tuned toward zero once the coefficients W are correctly
trained. To guarantee the precision of the coefficient training,
redundancy is usually introduced in the DSP engine. On the
other hand, a direct error detection and correction scheme is
proposed as shown in Fig. 1(b). The sign of error can be
detected as shown later. Thanks to the feedback loop and the
analog correction circuit, it is very convenient to stepwise
tune the error toward zero based on its sign. In this way,
only the sign needs to be processed compared with the whole
ADC output in Fig. 1(a). Besides, power-hungry operations
[e.g., multiplying in Fig. 1(a)] are avoided and only much
simpler calculations (e.g., accumulation) are needed. Further-
more, instead of a blind algorithm requiring many iterations,
the sign of the individual errors can be directly detected to
compensate these errors, reducing the convergence time and
required energy. Moreover, the actual correction is in analog
domain instead of digital signal processing as shown later,
consuming far less power. Overall, the proposed calibration
method has very little overhead in circuit complexity, area,
speed, and power.
A. ADC Architecture
Fig. 2 shows the architecture of the 13 b SAR ADC.
In each SAR conversion, first, the S&H samples the differ-
ential analog input voltage on the capacitor arrays inside the
DAC. Using the comparator and the logic, the DAC output
will approximate the sampled input voltage in several com-
parisons through a successive-approximation algorithm using
a monotonic switching scheme [16]. In this design, a total of
15 cycles is used to perform a 13 b conversion, where two of
them are redundant cycles to overcome various errors during
the conversion (e.g., DAC settling and noise), similar to [14].
The 13 b output is calculated from the 15 b raw code by an
on-chip digital adder. A two-mode comparator is introduced
to save power while still maintaining accuracy. Optionally, an
additional (16
th
) cycle can be activated for DAC mismatch
calibration or comparator offset calibration as shown later. All
the operations including the calibrations are asynchronously
controlled. Thus, only one relatively low-frequency sampling
clock f
s
is needed for both normal operation and calibration.
Fig. 3 shows the conversion scheme as well as the DAC of
the 13 b ADC. The 15 cycles include ten coarse cycles and
five fine cycles, where the 7
th
and 11
th
cycle are the redundant
cycles. The first redundant bit (7
th
cycle) relaxes DAC settling
time and facilitates the DAC mismatch calibration, which will
be explained later. Considering that the worst mismatch errors
happen for the largest capacitors, only the first five DAC
capacitors are calibrated in this paper. The capacitors lower
than the redundant bit are not calibrated; thus, they need to be
sufficiently linear intrinsically. Thanks to the second redundant
bit (11
th
cycle), a two-mode comparator can be employed [14].
This redundancy allows, first of all, the decision errors during
the coarse comparisons due to the comparator noise, thus
allowing a low-power mode comparator. Furthermore, since
the redundancy can tolerate the residual comparator offset
error after calibration as shown later, the comparator offset
calibration accuracy can be relaxed. The combination of
postcalibration comparator offset and coarse comparator noise
should remain within the redundancy range of the 11
th
bit,
which can tolerate errors up to ±8LSB.
B. Comparator Offset Error Detection
As mentioned earlier, the comparator works in the low-
power mode for the first cycles (coarse cycles), and it
only switches to the low-noise mode with higher power for
the last few cycles (fine cycles). In this way, the overall
power consumption of the comparator is reduced while it
still satisfies the noise requirement of the ADC. However,
the two-mode comparator will have two different offsets for
the corresponding two modes. Once this dynamic offset is
beyond the redundancy range (±8LSB), the ADC performance
cannot be recovered. Therefore, calibration of the dynamic
offset becomes necessary. The goal of the comparator offset
calibration is to minimize the offset difference V
delta
,which
equals V
off1
–V
off2
. Since a feedback loop [Fig. 1(b)] is used
to minimize V
delta
stepwise, rather than post processing, it is
sufficient to detect the sign of V
delta
only in order to minimize
its value.
The comparator dynamic offset detection is shown in Fig. 4.
The equivalent voltage at the comparator input V
eq
can be
viewed as a summation of the sampled input signal V
in
, DAC
reference voltage (V
DAC
), and the input-referred comparator
offset [V
off1(2)
]. The optional additional (16
th
) cycle is per-
formed on top of the 15-cycle comparison for a 13 b ADC.
The same comparison as the last (15
th
) cycle is repeated in
the additional (16
th
) cycle. The DAC code remains unchanged,
but the comparator switches from mode2 to mode1.Ideally,if
the two offsets are the same, the comparison result of the
last cycle (D
15
) and the additional cycle (D
16
) would be the
same. However, if the offsets are different, then the equivalent
剩余10页未读,继续阅读
682 浏览量
148 浏览量
151 浏览量
A 7b 2 GS/s Time-Interleaved SAR ADC with Time Skew Calibration Based on Current Integrating Sampler
121 浏览量
155 浏览量
2021-03-15 上传
2266 浏览量

nearbyboy
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
