Simulink中多车动态交互仿真教程
需积分: 10 55 浏览量
更新于2024-08-13
收藏 3.4MB PDF 举报
本资源是一份关于在Simulink中运行多个车辆仿真的技术备忘录,由Mechanical Simulation公司发布,主要针对 Carsim、Simulink 用户,旨在阐述如何在Simulink环境中实现多个来自VehicleSim产品(如BikeSim、CarSim和TruckSim)的车辆模型的动态交互。
在Simulink中运行多个车辆模型涉及到以下几个关键知识点:
1. **Simulink模型结构**:
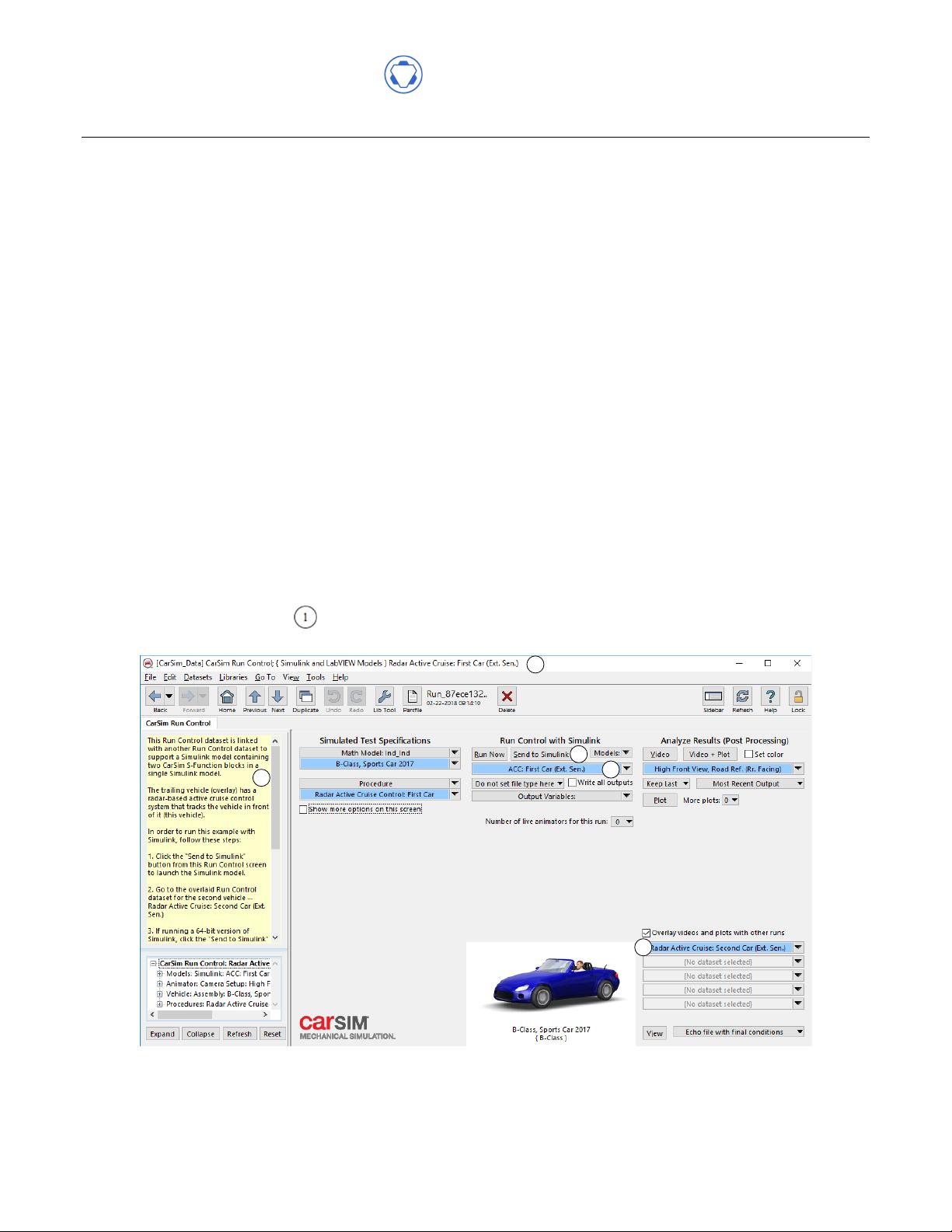
Simulink模型通常包含多个子系统和块,用于模拟不同组件和系统的交互。在多车辆仿真中,每个车辆可能对应一个独立的子系统,通过信号连接来实现它们之间的通信和交互。例如,图1展示了一个基于CarSim的Simulink模型,其中包含了两个RunControl数据集,分别与不同的车辆模型关联。
2. **Simulink数据集**:
数据集在Simulink环境中用于定义车辆的行为参数和输入输出。在本例中,"SimulinkDataset for the Lead Vehicle" 和 "SimulinkDataset for the Second Vehicle" 是两个独立的数据集,分别代表领头车和跟随车的特性。这些数据集可能包括车辆的动力学参数、传感器读数等。
3. **自定义Sim文件**:
自定义Sim文件允许用户根据需要调整车辆模型的内部算法和行为。在"Custom Sim files"部分,用户可以对车辆的控制器、动力系统或其他关键组件进行定制化设置,以适应特定的仿真需求。
4. **自定义求解器**:
在BikeSim中,可能存在名为"Custom Solvers"的特性,允许用户配置或编写自己的求解器来处理车辆动力学方程。这可能涉及到更高级的仿真控制,例如时间步长调整、稳定性优化等。
5. **多车辆模型考虑**:
当处理多个车辆模型时,需要考虑几个关键问题:
- **同步问题**:确保所有车辆模型在同一时间步上运行,以保证它们的交互是实时和准确的。
- **通信和交互**:定义和实施车辆间的信息交换,如雷达数据、位置和速度信息。
- **资源管理**:处理计算资源的分配,以确保大规模模型的高效仿真。
- **边界条件**:设定合理的环境条件,如道路状况、交通规则和其他外部影响。
6. **RunControl数据集**:
RunControl数据集在CarSim中是用于控制车辆行为和仿真参数的配置文件。在多车辆场景中,每个车辆可能有不同的RunControl设置,比如第一个车辆的RadarActiveCruise数据集可能定义了雷达巡航控制策略。
这份技术备忘录详细介绍了如何在Simulink中构建和运行包含多个车辆模型的仿真场景,对于理解车辆动态交互和控制系统设计具有重要指导意义。无论是车辆系统工程师还是Simulink用户,都能从中学习到如何有效地进行多车辆联合仿真。
Mechanical Simulation Technical Memo
755 Phoenix Drive, Ann Arbor MI, 48108, USA
Phone: 734 668-2930 • Fax: 734 668-2877 • Email: info@carsim.com carsim.com
1 / 9 February 2018
Running Multiple VS Vehicles in Simulink
Example Simulink Model with Two Vehicles ....................................................... 1
The Simulink Model ........................................................................................ 2
Models: Simulink Dataset for the Lead Vehicle .............................................. 4
Custom Simfiles ............................................................................................... 5
Models: Simulink Dataset for the Second Vehicle .......................................... 5
Custom Solvers in BikeSim ............................................................................. 7
Considerations with Multiple Vehicle Models ....................................................... 8
This document describes how multiple vehicles from a VehicleSim (VS) product (BikeSim,
CarSim, and TruckSim) can interact dynamically in a single Simulink model.
Example Simulink Model with Two Vehicles
The example simulation in this memo is based on datasets included in CarSim; similar examples
also exist in TruckSim and BikeSim. The example uses two Run Control datasets, each linked to
a different vehicle, and both linked to the same Simulink model. In CarSim, the two Run Control
datasets are in the Datasets category Simulink and LabVIEW Models with titles that begin with
Radar Active Cruise (Figure 1).
Figure 1. Run Control dataset for the first car in the multi-vehicle example.
1
2
3
4
5
下载后可阅读完整内容,剩余8页未读,立即下载
2021-10-10 上传
2021-07-10 上传
2021-10-16 上传
2022-07-01 上传
2021-10-29 上传
2022-07-01 上传
2021-10-13 上传
2021-12-18 上传
2021-10-31 上传

healer阳
- 粉丝: 1
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
