干涉 Synthetic Aperture Radar (InSAR) 基础与信号处理指南
需积分: 10 165 浏览量
更新于2024-07-30
收藏 5MB PDF 举报
"这篇资源是针对初学者的干涉合成孔径雷达(Interferometric Synthetic Aperture Radar, IFSAR)概念和信号处理的入门指南,由IEEE资深会员MARK A. RICHARDS撰写,来自乔治亚理工学院。IFSAR利用高分辨率的SAR图像对,通过相位干涉技术生成高精度的地形高程地图,具有全天候、昼夜作业能力,能够以厘米级的精度在密集的采样点上测量地形高程。文中不仅涵盖了空间和机载IFSAR系统,还深入介绍了IFSAR的基本方程、算法步骤以及应用变化。"
IFSAR是一种高级遥感技术,它结合了合成孔径雷达(SAR)和干涉测量原理,能够在云雾、日夜任何天气条件下提供精确的地形信息。SAR通过发射和接收雷达波,利用雷达与目标之间的相对运动,合成一个大的虚拟天线孔径,从而获得高分辨率的地面图像。IFSAR则更进一步,通过对比两个或多个SAR图像的相位差异,来确定地表的微小高度变化。
在论文的初步部分,作者首先介绍了数字高程模型(Digital Elevation Models, DEMs)和数字地形高程数据(Digital Terrain Elevation Data, DTED),这是IFSAR工作的基础。DEMs是地形的三维表示,而DTED是用于地形分析的高精度数据集。接着,IFSAR的核心方程被导出,该方程将相位测量与地形高程联系起来,基于简单的几何考虑。
文章的主体部分详细阐述了构建IFSAR地形图所需的算法步骤,包括相位解缠、干涉图的生成、高程解算等关键过程。这些步骤对于理解和应用IFSAR技术至关重要,因为它们涉及到从原始SAR数据到高精度地形模型的转换。
最后,论文简要讨论了IFSAR在地形高程测绘和反射率变化监测方面的不同应用。IFSAR不仅可以用于地形测绘,还可以用于监测地表的微小变化,如地震后的地表形变、冰川的消融、城市扩张等环境和地质现象。
这篇指南为那些想要了解IFSAR基本原理和实践操作的读者提供了全面的入门资料,涵盖了从理论到实际应用的全过程,是学习IFSAR技术的宝贵参考资料。
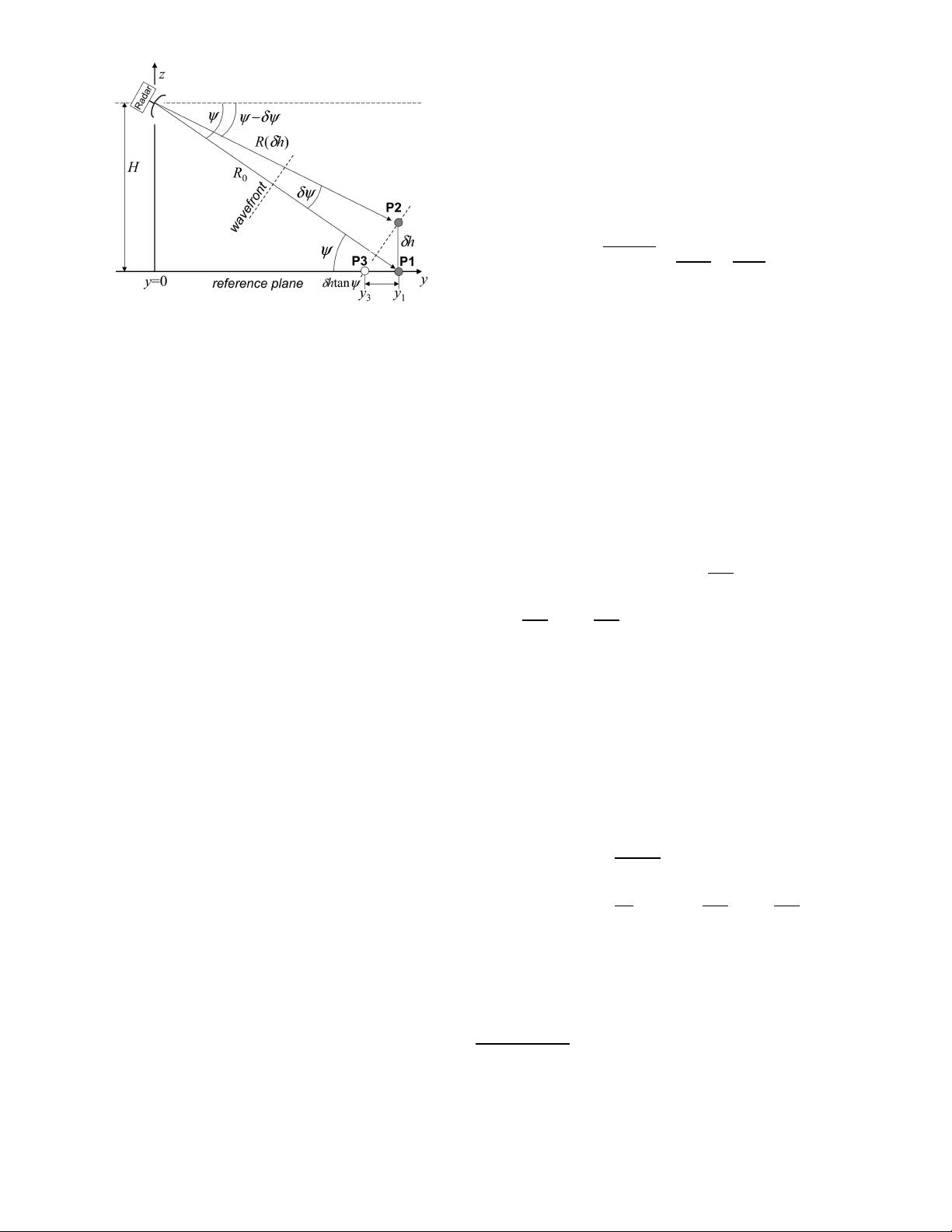
Fig. 5. Geometry for determining the effect of scatterer height on
received phase.
capability and has a higher cost per unit area, thus
being most useful for localized mapping. Timely
access to a given region can be limited by airspace
restrictions or simply the time required to transport
an instrument to the area. The much lower altitude of
airborne systems makes the area coverage rate much
smaller as well.
Airborne systems require high precision motion
compensation to overcome the defocusing and
mislocation effects resulting from path deviations
caused by vibration, atmospheric turbulence, and
winds. These effects are much reduced or absent
in spaceborne systems, although platform orbit and
attitude must still be carefully controlled. Spaceborne
systems are subject to dispersive ionospheric
propagation effects, principally variable path delays in
two-pass systems up to tens of meters, that are absent
in airborne systems [5]. Both air- and spaceborne
systems suffer potential errors due to differential delay
through the wet troposphere. For example, using 1995
Shuttle Imaging Radar-C (SIR-C) repeat-track data
(not the SRTM mission of 2000), Goldstein [30]
estimates rms path length variations of 0.24 cm at
both L and C band. For the baselines used in those
experiments, this translates into a 6.7 m rms elevation
estimate error.
V. BASIC INTERFEROMETRIC SAR RELATIONSHIPS
A. The Effect of Height on the Phase of a Radar Echo
Since IFSAR is based on phase measurements,
we begin our derivation of basic IFSAR equations
by considering the phase of a single sample of the
echo of a simple radar pulse from a single point
scatterer. Consider the geometry shown in Fig. 5,
which shows a radar with its antenna phase center
located at ground range coordinate y =0andan
altitude z = H meters above a reference ground
plane (not necessarily the actual ground surface).
The positive x coordinate (not shown) is normal to
the page, toward the reader. A scatterer is located at
position
P1 on the reference plane z = 0 at ground
range dimension y
1
. The reference ground plane,
in some standard coordinate system, is at a height
h
ref
, so that the actual elevation of the radar is h =
h
ref
+ H andofthescattererisjusth
ref
.However,
h
ref
is unknown, at least initially. The depression
angle of the LOS to
P1, relativ e to the local
horizontal, is à rad, while the range to
P1 is
R
0
=
q
y
2
1
+ H
2
=
y
1
cos Ã
=
H
sinÃ
: (6)
The radar receiver is coherent; that is, it has both
in-phase (I) and quadrature (Q) channels, so that it
measures both the amplitude and phase of the echoes.
Consequently, the transmitted signal can be modeled
as a complex sinusoid [31]:
¯
x(t)=Aexp[j(2¼F t + Á
0
)], 0 · t · ¿ (7)
where F is the radar frequency (RF) in hertz,
3
¿ is
the pulse length in seconds, A is the real-valued pulse
amplitude, and Á
0
is the initial phase of the pulse in
radians. The overbar on
¯
x indicates a signal on an RF
carrier. The received signal, ignoring noise, is
¯
y(t)=
ˆ
A½exp
½
j
·
2¼F
µ
t ¡
2R
0
c
¶
+ Á
0
¸¾
,
2R
0
c
· t ·
2R
0
c
+ ¿:
(8)
In (8), ½ is the complex reflectivity of
P1 (thus ¾,the
radar cross section (RCS) of
P1, is proportional to
j½j
2
)and
ˆ
A is a complex-valued constant incorporating
the original amplitude A, all radar range equation
factors other than ¾, and the complex gain of the radar
receiver.Weassumethat½ is a fixed, deterministic
value for now.
After d emodulation to remove the carrier and
initial phase, the baseband received signal is
y(t)=
ˆ
A½exp
µ
¡j
4¼F R
0
c
¶
=
ˆ
A½exp
µ
¡j
4¼
¸
R
0
¶
,
2R
0
c
· t ·
2R
0
c
+ ¿:
(9)
If this signal is sampled at a time delay t
0
anywhere in
the interval 2R=c · t
0
· 2R=c + ¿ (that is, in the range
gate or range bin corresponding to range R), the phase
3
We follow the practice common in digital signal processing
literature of denoting unnormalized frequency in hertz by the
symbol F, and reserving the symbol f for normalized frequency in
cycles, or cycles per sample. A similar convention is used for radian
frequencies − and !.
IEEE A&E SYSTEMS MAGAZINE VOL. 22, NO. 9 SEPTEMBER 2007 PART 2: TUTORIALS–RICH ARDS 9
剩余24页未读,继续阅读
2018-06-19 上传
2019-01-09 上传
2014-04-10 上传
2023-03-29 上传
2023-03-31 上传
2023-06-03 上传
2023-03-31 上传
2023-03-16 上传
2023-04-02 上传

liu8386898
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
