
Standardized ARS Interface
Continental Engineering Services GmbH
October 18, 2017 page 10
This document is related to
ARS 404-21 / 408-21 SW 04.30.1.16 / 04.10.0.16
5. Description
The ARS sensor uses radar radiation to analyze its surroundings. The reflected signals are
processed and after multiple steps they are available in form of clusters and objects.
Clusters are radar reflections with information like position, velocity and signal strength.
They are newly evaluated every cycle. In contrast to this, objects have a history and
dimension. They consist of tracked clusters.
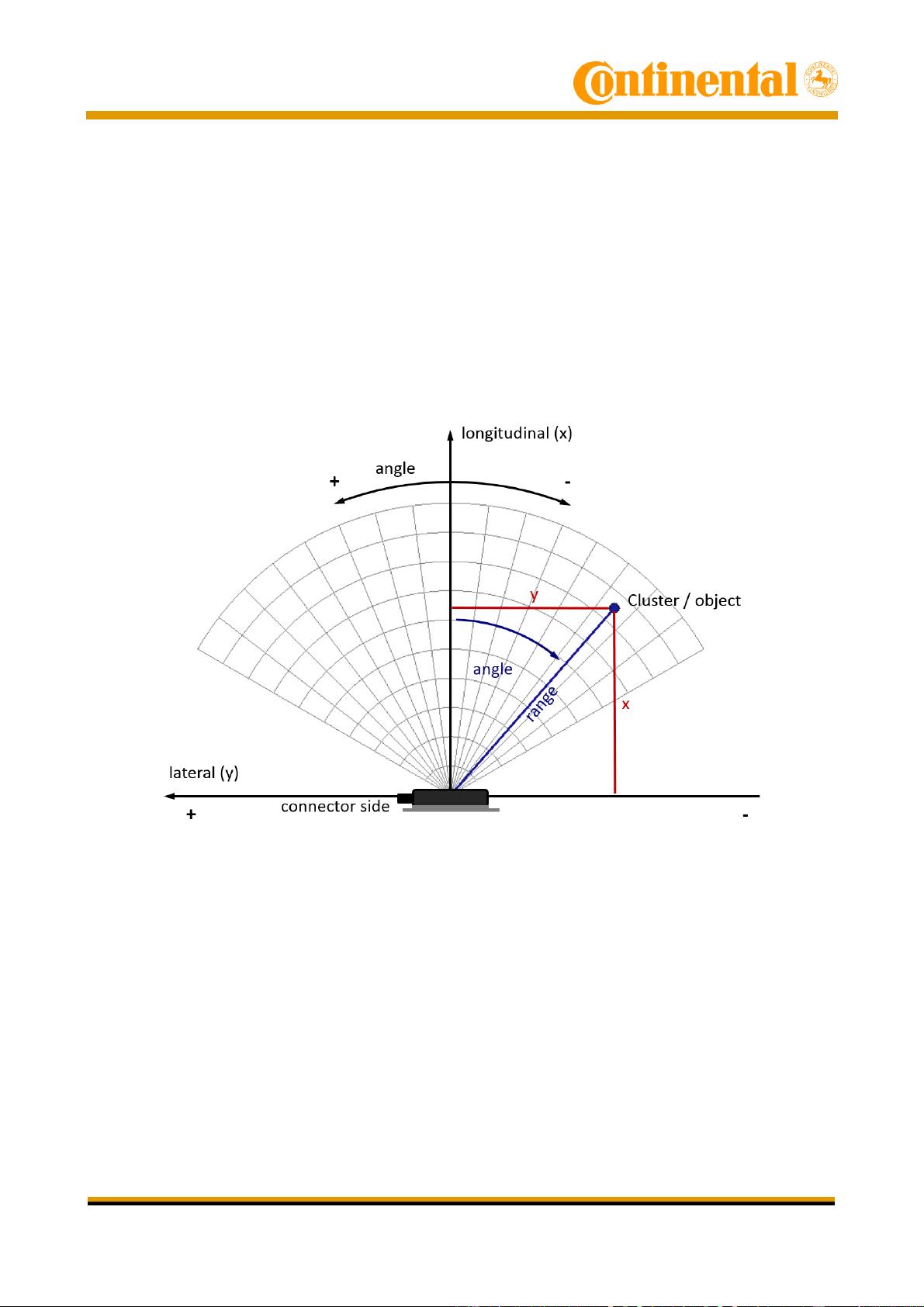
The position is given in a Cartesian coordinate system relative to the sensor as shown in
Figure 1. The velocity is calculated relative to an assumed vehicle course. The course is
determined by using the speed and yaw rate information assuming that the radar sensor is
mounted on the front and the movement is in longitudinal direction. If speed and yaw rate
information is missing, it will be set to default values: yaw rate = 0 deg/s, speed = 0 m/s and
standstill.
Figure 1: ARS40X coordinate system for clusters and objects.
Optionally, the output cluster and object lists can be filtered by setting filter criteria based on
their attributes. Like this, the clusters or objects of interest that are sent on the CAN-bus can
be selected. The filters for different attributes can be combined. More information on the
filter configurations can be found in section 6.2.
Furthermore, a region-based collision detection is implemented on the sensor. If objects are
detected within up to eight defined regions, the sensor will issue a warning message. More
information on the collision detection configuration can be found in sections 6.3 and
6.4
.

剩余54页未读,继续阅读

范德科技
- 粉丝: 5
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


