




三相步进电机与机械臂定位控制详解:第3版组装调试6步进电机
版权申诉
93 浏览量
更新于2024-06-14
收藏 3.18MB PDF 举报
自动化生产线组建与调试(第3版)深入探讨了步进伺服电机在机械臂定位控制中的关键应用。本章详细介绍了步进电动机的基本结构、工作原理及其在工业自动化中的重要性。步进电机是一种机电执行元件,通过电脉冲信号实现精确的线位移或角位移控制。它主要分为反应式、永磁式和混合式三种类型,每种类型的电机在输出转矩、运行速度和控制精度上有所不同。
步进电机的核心概念包括转角、转速和转向,它们由输入的脉冲数量、频率以及方向信号共同决定。转角由每个脉冲对应的角度决定,转速则取决于脉冲频率,而转向则是通过调整脉冲的顺序来控制。这种电机具有数字化执行机构的特点,能实现脉冲控制下的精准运动。
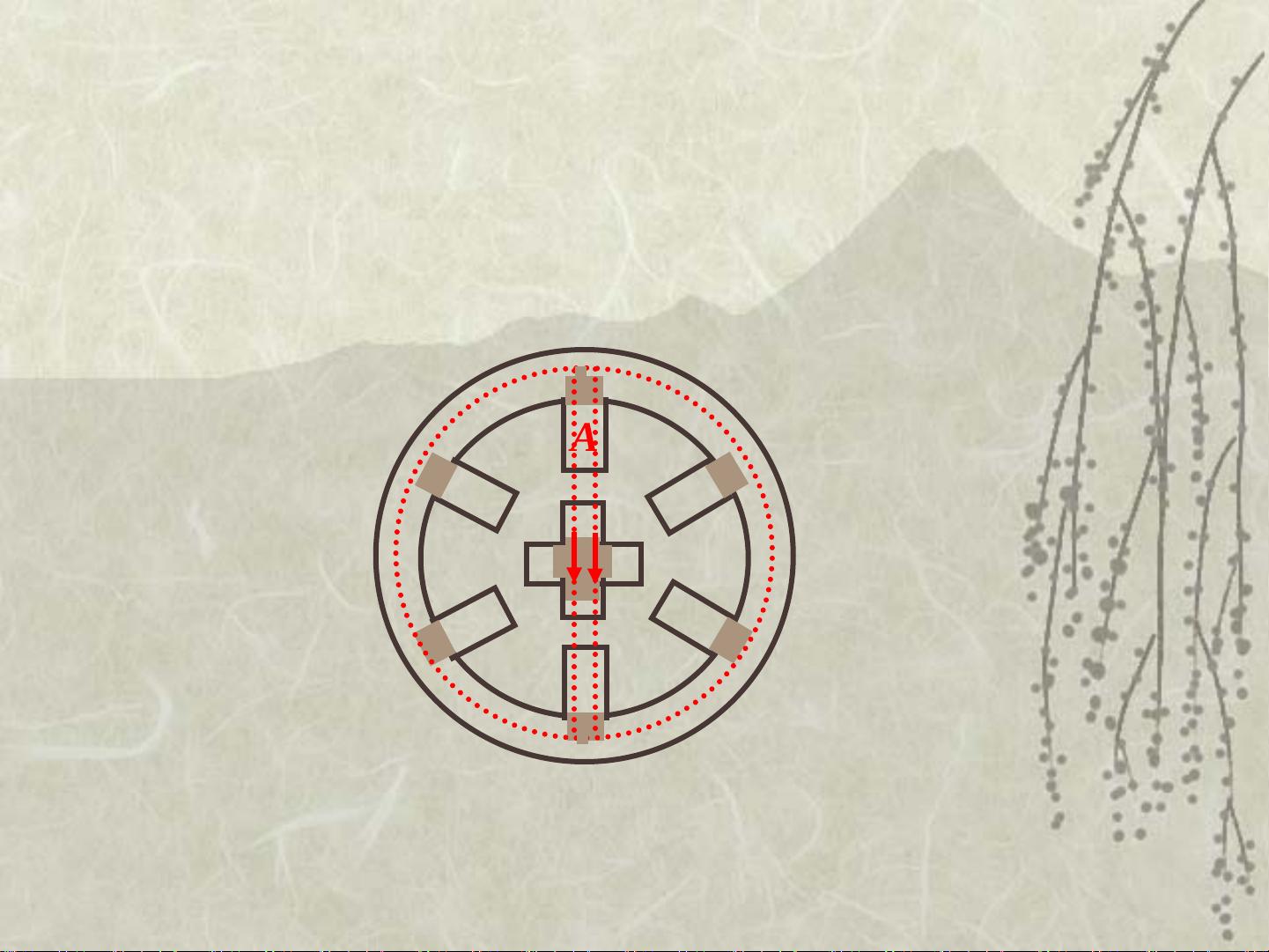
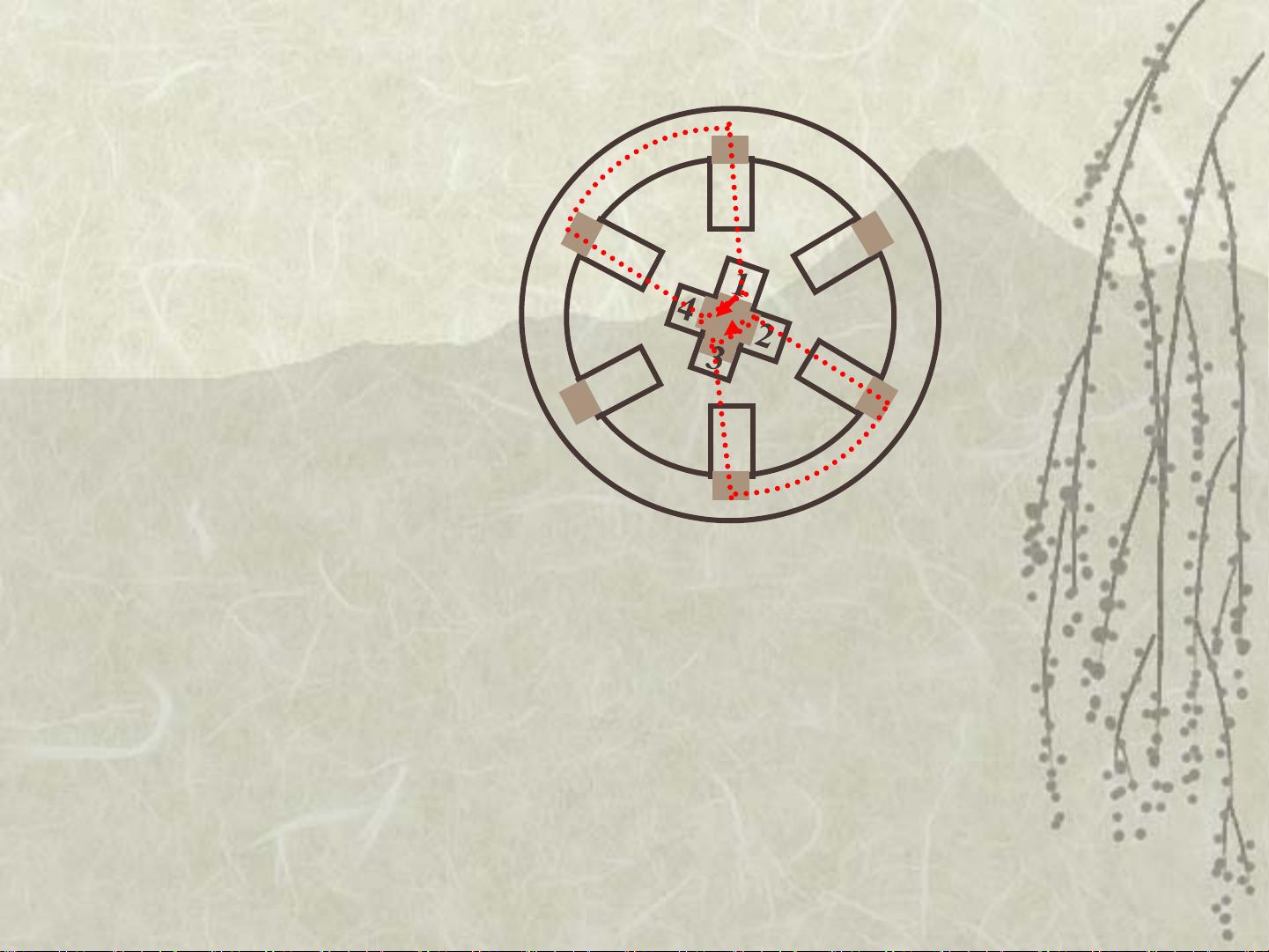
在实际应用中,步进电动机通常由定子和转子构成,定子包含控制绕组和磁极,转子则有磁性齿,通过电磁吸力驱动转子旋转。工作方式有多种,如三相单三拍、三相单双六拍和三相双三拍等,这些不同的接线和通电顺序影响电机的步进行为和同步性能。
书中还提到了反应式、永磁式步进电机的结构特点,如反应式步进电机的励磁绕组通过外部脉冲轮流励磁,永磁式则依赖永久磁铁产生磁场。步进电机的实际应用中,需要注意控制脉冲的频率和顺序以确保机械臂在自动化生产线上能够准确、稳定地进行定位。
本章内容深入剖析了步进伺服电机的工作机制、分类、结构以及在机械臂定位中的关键作用,这对于理解和设计自动化生产线至关重要,有助于提升生产效率和精度。
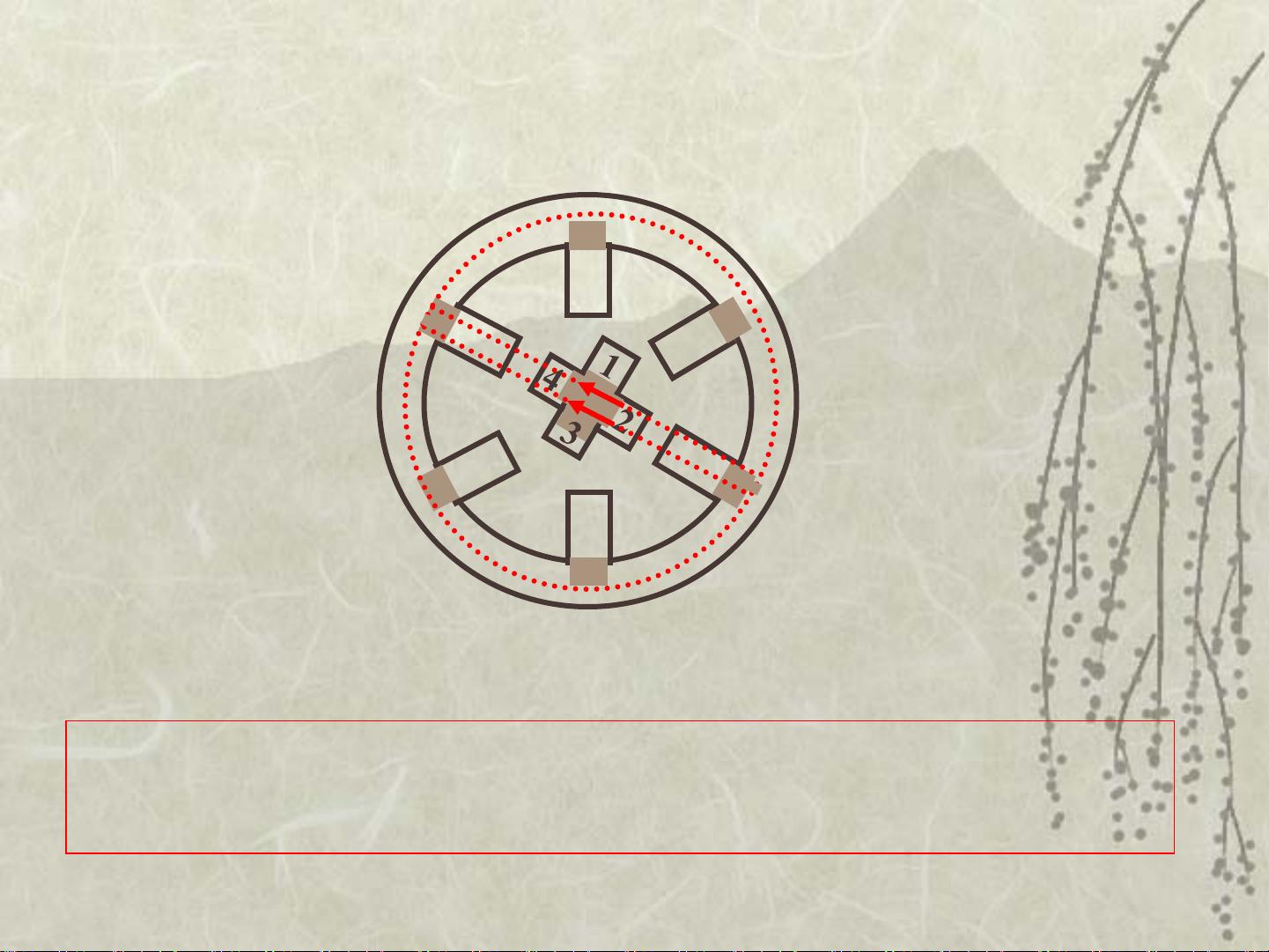
这种工作方式,因三相绕组中每次只有一相通电,
而且,一个循环周期共包括三个脉冲,所以称三相
单三拍。
三相单三拍的特点:
(1)每来一个电脉冲,转子转过 30°。此角称为
步距角,用
θ
S
表示。
(2)转子的旋转方向取决于三相线圈通电的顺序,
改变通电顺序即可改变转向。
剩余126页未读,继续阅读
2022-07-07 上传
183 浏览量
1652 浏览量
126 浏览量
2025-04-13 上传

ohmygodvv
- 粉丝: 508
 我的内容管理
展开
我的内容管理
展开








最新资源
- 实现ViewPager+Fragment仿微信底部TAG渐变效果
- C语言在Windows下的日期时间操作类实现
- VC语言获取系统进程列表的实现方法
- Android开发指南:eoe特刊23期详解
- 打造仿QQ聊天界面:带横向滑动删除的表情功能
- 在线编辑JSON格式的利器:JSONedit使用体验
- 深入浅出面向对象程序设计的C#实战指南
- SQL SERVER基础操作:增删改查及视图和存储过程
- 探索74LS74系列:数字逻辑集成器件核心解析
- 批量图片下载器PictureDown的C#源码解析与实现
- 网上订餐系统源码与论文资源 - JSP/Struts/Hibernate
- 实现QQ风格下拉菜单的MFC ComBox控件
- CHAN - 深度解析JavaScript项目
- Java实现带进度条文件上传功能详解
- 开源网店系统NopCommerce 2008版本发布
- 图标合集压缩包 - icon图标资源大全






















