无人地面车辆自主性评价指标体系构建
197 浏览量
更新于2024-08-31
收藏 506KB PDF 举报
"无人地面车辆自主性评价指标体系的研究旨在评估UGV的自主能力,包括感知、规划、运动控制、行为和学习5个方面。该文提出了基于ALFUS定义的自主性概念,并讨论了现有自主性评价模型。无人地面车辆通过传感器获取环境信息,进行任务和路径规划,以实现安全可靠的运行。"
无人地面车辆(UGV)是现代军事和科技领域的关键组成部分,其自主性是衡量其性能的重要标准。自主性不仅关乎车辆能否在无需人工干预的情况下完成任务,还涉及到其在复杂环境中的适应性和智能决策能力。本文通过对美国陆军无人地面车辆发展的分析,构建了一套全面的自主性评价指标体系。
首先,这个体系将无人地面车辆的自主性能力分解为五个主要评价方面:
1. **感知能力**:这是UGV理解周围环境的基础,包括通过各类传感器(如摄像头、雷达、激光雷达等)收集信息,以及对这些信息的融合处理,以形成精确的环境模型。
2. **规划能力**:UGV需要具备实时任务规划和路径规划能力,能够在动态环境中找到最优化的行动策略,确保任务的高效执行。
3. **运动控制能力**:车辆必须能够精确控制自身的运动状态,包括转向、速度调整,以应对各种路面条件和障碍物,确保行驶的安全和稳定性。
4. **行为能力**:这涉及到UGV如何根据任务需求和环境变化做出反应,如避障、目标识别和抓取等具体操作。
5. **学习能力**:UGV应具备一定的学习和适应能力,可以通过机器学习或强化学习等方式,不断优化其行为策略,提升在未来任务中的表现。
现有的自主性评价模型多是对ALFUS工作组提出的三因素模型的扩展,这些模型通常注重任务完成度、效率和时间等因素,但在全面评估UGV的复杂决策和自我改进能力上可能存在局限性。
无人地面车辆的自主性研究是一个持续发展的领域,随着人工智能和机器人技术的进步,UGV的自主性将进一步增强,其在军事、民用领域的应用也将更加广泛。例如,UGV可以用于危险环境的探测、搜救任务,以及在战场上的后勤支持和侦察活动。
无人地面车辆自主性的评价体系是一个综合性的框架,它涵盖了从基础感知到高级决策的各种能力,对于推动UGV技术的发展和应用具有重要意义。未来的研究将继续探索更精确、全面的评价方法,以促进UGV自主性的不断提升。
无人地面车辆自主性评价指标体系研究无人地面车辆自主性评价指标体系研究
自主性是无人系统最为重要的性能指标之一,在对美国陆军无人地面车辆发展进行分析的基础上,以无人地面车
辆自主性能力作为总体评价目标,从体现其自主性应具备的能力要素出发,分为感知能力、规划能力、运动控
制能力、行为能力和学习能力5个评价方面,每个评价方面又包含多个能力因素,以此建立无人地面车辆自主性
评价指标体系。
李静1,2, 唐振民2, 谭业发1, 石朝侠2
(1.解放军理工大学 野战工程学院,江苏 南京 210007; 2.南京理工大学 计算机科学与工程学院,江苏 南京 210094)
摘要摘要:自主性是无人系统最为重要的性能指标之一,在对美国陆军
关键词关键词:无人地面车辆; 自主性评价; 指标体系
0引言引言
地面无人系统在军事上称作无人地面车辆(Unmanned Ground Vehicle,UGV),其能够在各种地面环境中无须人工干预,
连续、自主地完成任务[1]。海湾战争以来,以无人机和无人车为代表的无人系统在战争中的作用日益凸显,对国防、社
会、经济和科学技术产生了重大影响。美国于2000~2013年间连续发布了7个版本的无人系统路线图,不断调整美军无人系统
的近、远期发展目标,将其作为未来作战系统的一部分,用于后勤运输和战备补给,或在遂行侦查、监视、目标获取及单兵作
战等军事任务中应用[24]。
1自主性概念自主性概念
自主性是无人系统最重要的性能指标之一,一般采用无人系统自主性级别工作组(ALFUS)给出的定义,即自主性是无人
系统在预定任务目标实现过程中感知、理解、分析、交流、规划及决策制定与执行的能力[56]。当前,无人系统自主性研
究已成为各国关注的热点问题,如李一波等人提出的四指标模型[7],王越超等人采用的蛛网模型[8],杨哲等采用的模糊评
价方法[9],都是对ALFUS工作组三因素评价模型的扩展。在现场比赛中一般以是否完成单项任务、完成任务的总数和完成
时间作为评价和打分依据,如“2014中国智能车未来挑战”大赛和“跨越险阻-2014”地面无人平台挑战赛,这种方法直观、易操
作,但很难全面地评价无人地面车辆的自主性能力。
2无人地面车辆自主性能力指标分解无人地面车辆自主性能力指标分解
无人地面车辆利用安装在不同部位的传感器来感知周围环境,获得道路、自身位姿、障碍物和背景环境等信息,经数据融
合建立环境模型,进行实时任务和路径规划,最终通过转向和速度控制实现系统安全、可靠地运行[10]。鉴于智能技术、
传感器技术、数据融合技术等的发展现状,战时环境下的自主性能力仍处于研究初期,有些能力只能以是否具备作为评价标
准。因此,本文按层次分析法理论要求,以无人地面车辆自主性能力作为评价目标,从体现其自主性应具备的能力要素出发,
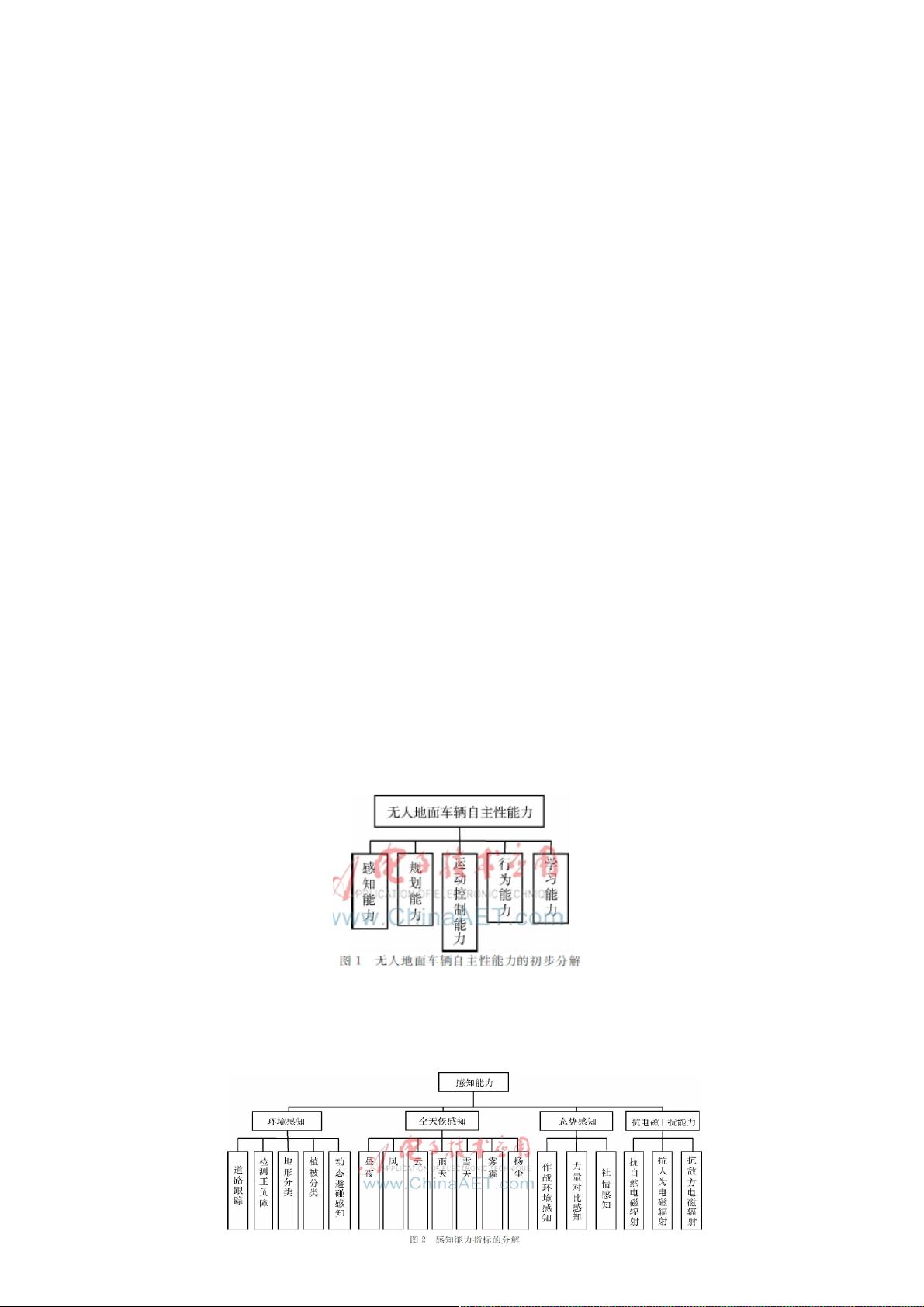
分为感知能力、规划能力、运动控制能力、行为能力和学习能力5个评价方面,如图1所示,更加符合技术发展的要求。
2.1感知能力感知能力
在感知过程中,无人地面车辆对多传感器信息进行融合,信息包括道路边界、障碍物、交通信号和标识、路侧环境、天候
环境等,并能在越野环境中检测、定位、测量和分类地表物体和环境,判断可通过性,为规划提供依据,如图2所示。
下载后可阅读完整内容,剩余4页未读,立即下载
2024-07-28 上传
2024-06-05 上传
2021-05-04 上传
2024-09-01 上传
2018-08-03 上传
2019-09-05 上传
2023-09-06 上传
2021-03-06 上传

weixin_38706294
- 粉丝: 4
- 资源: 918
 我的内容管理
展开
我的内容管理
展开







最新资源
- 彩虹rain bow point鼠标指针压缩包使用指南
- C#开发的C++作业自动批改系统
- Java实战项目:城市公交查询系统及部署教程
- 深入掌握Spring Boot基础技巧与实践
- 基于SSM+Mysql的校园通讯录信息管理系统毕业设计源码
- 精选简历模板分享:简约大气,适用于应届生与在校生
- 个性化Windows桌面:自制图标大全指南
- 51单片机超声波测距项目源码解析
- 掌握SpringBoot实战:深度学习笔记解析
- 掌握Java基础语法的关键知识点
- SSM+mysql邮件管理系统毕业设计源码免费下载
- wkhtmltox下载困难?找到正确的安装包攻略
- Python全栈开发项目资源包 - 功能复刻与开发支持
- 即时消息分发系统架构设计:以tio为基础
- 基于SSM框架和MySQL的在线书城项目源码
- 认知OFDM技术在802.11标准中的项目实践
