MATLAB模拟四杆机构运动分析
版权申诉
"基于matlab的四杆机构运动分析"
四杆机构是一种常见的机械装置,尤其在平面连杆机构中占据重要地位。曲柄摇杆机构是四杆机构的一个典型实例,它通过转动副连接四根杆,能有效地将旋转运动转化为往复摆动或反之。在工程设计中,对这类机构进行运动分析至关重要,因为这有助于理解和优化其运动性能。
运动分析的主要任务包括确定在给定尺寸参数下,当主动件(通常是曲柄)以恒定速度旋转时,从动件(连杆、摇杆)的角位移、角速度和角加速度的变化。此外,分析还能揭示位移偏差,这对于确保机构在实际工作中的精度和效率非常重要。设计新机械或评估现有机械性能时,这些运动参数是不可或缺的参考依据。
分析机构运动的方法分为图解法和解析法。图解法适用于快速直观地了解机构在特定位置的运动特性,适用于对精度要求不高的情况。而解析法,特别是结合计算机辅助计算,可以提供更精确的运动分析结果,包括整个运动周期内的特性,并能够生成机构的运动轨迹图。这种方法还能用于机构的优化设计,通过对不同设计方案的比较,选择最佳结构。
在平面四杆机构中,形成曲柄的条件包括杆长条件和杆的相对位置。杆长条件规定了最短杆与最长杆的长度关系,即最短杆加上最长杆的长度不超过其余两杆长度之和。此外,最短杆必须是连架杆或机架,才能形成曲柄摇杆机构或双曲柄机构。
数学建模是机构分析的关键步骤。通常,我们会建立闭环矢量位置方程来描述各构件之间的相对位置。例如,在直角坐标系下,用矢量表示各杆,并构建一个封闭的矢量多边形。对于图1所示的四杆机构,利用各杆长度和方位角,我们可以得到矢量方程的表达式,如式1所示。在已知条件(构件长度和原动件的运动规律)下,可以解出未知的方位角,进一步推导出角位移方程的分量形式,如式2所示。
Matlab作为一种强大的数值计算和可视化工具,非常适合进行四杆机构的运动分析。通过编写程序,可以模拟机构的运动,计算所需的运动参数,并绘制出动态图形,以直观展示机构的工作状态。这样的分析对于理解机构行为、优化机构设计以及在实际应用中预测性能具有极大的价值。
2 基于 MATLAB 程序设计
四连杆机构的解析法同样可以用 MATLAB 的计算工具来求值,并结合 MATLAB 的可
视化手段,把各点的计算值拟合成曲线,得到四连杆机构的运动仿真轨迹。
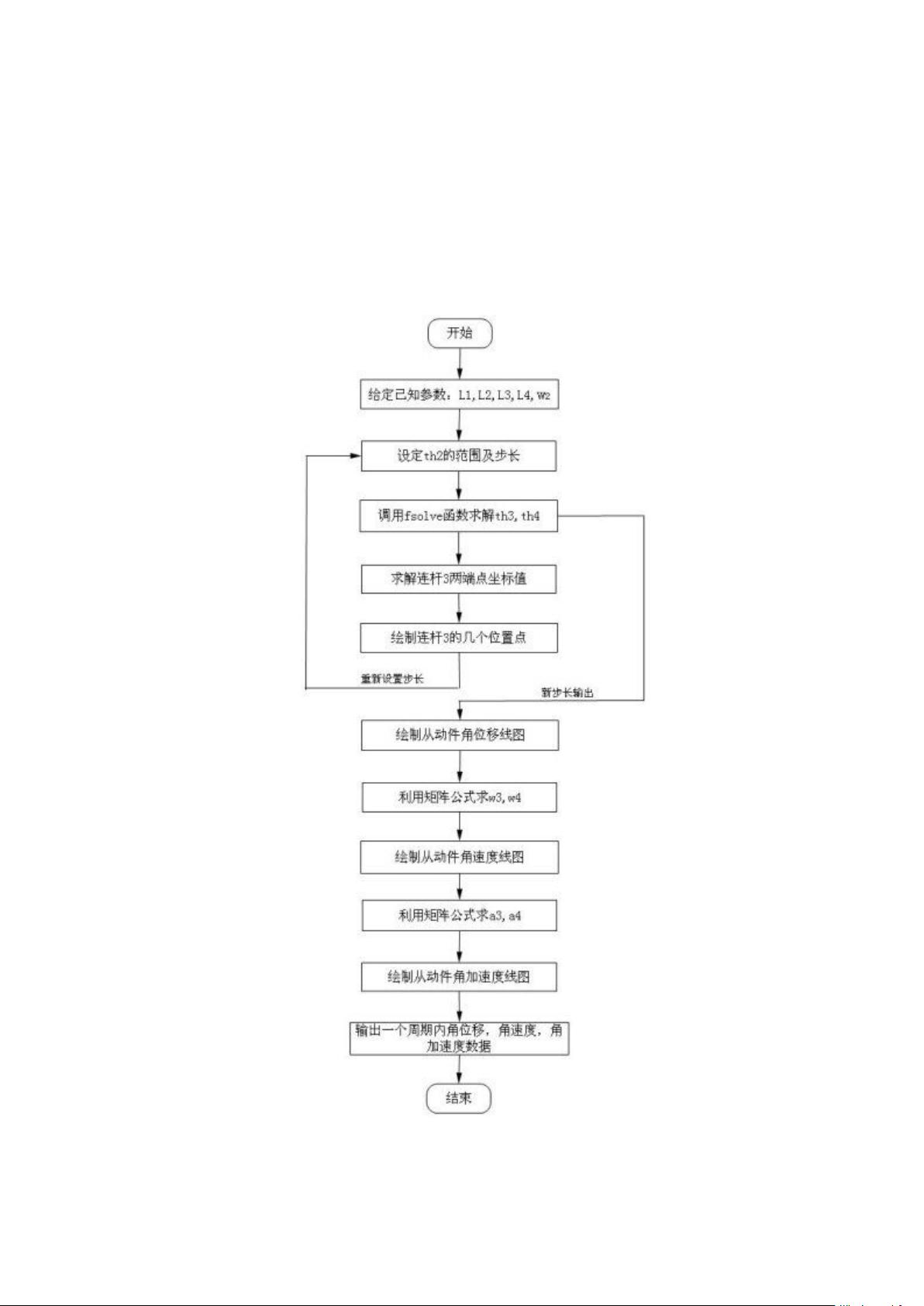
2.1 程序流程图
下载后可阅读完整内容,剩余15页未读,立即下载
相关推荐
1879 浏览量
2022-06-25 上传
111 浏览量
2022-07-05 上传
2022-12-02 上传
212 浏览量
171 浏览量
134 浏览量

智慧安全方案
- 粉丝: 3886
 我的内容管理
展开
我的内容管理
展开








最新资源
- 探索 Scratch 动画 - BlueberryDan (E3_S1) 的精彩
- Matlab实现从AVI视频中提取精确图片的方法
- 520Lab研究所七夕线上答题小游戏开发指南
- 详述OA系统需求分析赚钱项目
- Wayfire GSettings插件使用教程与配置指南
- 蝶形封装激光器3D模型详解及btf-14封装特点
- OADA身份验证JavaScript客户端库使用指南
- 紫色发光按钮悬停特效:CSS3动画实现
- PHP DebugBar Redis Collector:扩展PHP调试工具
- OA系统操作简易手册:全面指导赚钱项目
- 任务管理器开发指南:依赖、样式、环境配置
- Node.js中使用Craft AI实现智能家居灯光自动化的教程
- Bootstrap3打造黑色响应式个人博客模板
- My-Mybatis: 手写实现Mybatis核心功能与注解支持
- iTracker: 提升阅读效率的网络速读工具
- OA系统操作手册简明版压缩包下载
