时空图路由:骨架动作识别新方法
需积分: 9 31 浏览量
更新于2024-08-12
收藏 1.12MB PDF 举报
"这篇研究论文探讨了基于骨架的动作识别中的时空图路由方法,旨在改进现有的骨骼动作识别技术,通过自适应学习骨骼关节之间的内在高阶关联性,提高识别的准确性和鲁棒性。作者提出了一个新颖的时空图路由(STGR)方案,该方案由空间图路由器和时间图路由器两部分组成,能够捕捉物理上分离的骨骼关节的动态交互。"
在当前的计算机视觉和人工智能领域,基于骨架的动作识别是一个关键的研究方向,它在安全监控、人机交互和体育分析等领域有着广泛的应用。传统的骨架结构依赖于固定的物理连接,这种方法往往无法有效地捕捉到骨骼关节间的内在高阶关联,限制了识别性能。
论文提出的STGR方案是一种创新的方法,它打破了固定骨骼结构的限制,通过学习和路由骨骼节点之间的时空信息来挖掘动作的复杂模式。空间图路由器关注于静态的骨架结构,即在单个帧内关节之间的关系,而时间图路由器则处理帧与帧之间的动态变化,捕捉动作的连续性和流畅性。这种两步方法结合了空间和时间维度的信息,可以更好地理解动作的连贯性和关节运动的规律。
具体来说,空间图路由器通过学习关节的邻接关系,构建了一个可变的图结构,这个结构可以动态地反映关节间的非物理联系,从而揭示了关节间的隐藏关联。时间图路由器则利用这一空间关系,通过路由算法跟踪关节在不同时间步的动态变化,这有助于捕捉动作的时间演化特征。
此外,论文可能还讨论了STGR在实际应用中的效果,包括实验设计、数据集选择(如NTU RGB+D或Kinetics)、性能比较(与其他方法的准确率对比)以及可能的局限性和未来的研究方向。这样的工作不仅提升了动作识别的准确性,也为理解和解决骨架数据的复杂性提供了新的视角,对后续研究具有重要启示。
"基于骨架的动作识别的时空图路由"研究论文提出了一种新颖的框架,通过自适应的图路由策略,提高了对复杂人体动作的理解和识别能力,为骨骼动作识别技术的发展开辟了新的道路。
The Thirty-Third AAAI Conference on Artificial Intelligence (AAAI-19)
Spatio-Temporal Graph Routing for Skeleton-Based Action Recognition
Bin Li,
1
Xi Li,
2∗
Zhongfei Zhang,
1
Fei Wu
2
1
College of Information Science & Electronic Engineering, Zhejiang University, Hangzhou, China
2
College of Computer Science and Technology, Zhejiang University, Hangzhou, China
{bin li, xilizju, zhongfei}@zju.edu.cn wufei@cs.zju.edu.cn
Abstract
With the representation effectiveness, skeleton-based human
action recognition has received considerable research at-
tention, and has a wide range of real applications. In this
area, many existing methods typically rely on fixed physical-
connectivity skeleton structure for recognition, which is in-
capable of well capturing the intrinsic high-order correla-
tions among skeleton joints. In this paper, we propose a novel
spatio-temporal graph routing (STGR) scheme for skeleton-
based action recognition, which adaptively learns the in-
trinsic high-order connectivity relationships for physically-
apart skeleton joints. Specifically, the scheme is composed
of two components: spatial graph router (SGR) and tempo-
ral graph router (TGR). The SGR aims to discover the con-
nectivity relationships among the joints based on sub-group
clustering along the spatial dimension, while the TGR ex-
plores the structural information by measuring the correla-
tion degrees between temporal joint node trajectories. The
proposed scheme is naturally and seamlessly incorporated
into the framework of graph convolutional networks (GCNs)
to produce a set of skeleton-joint-connectivity graphs, which
are further fed into the classification networks. Moreover, an
insightful analysis on receptive field of graph node is pro-
vided to explain the necessity of our method. Experimental
results on two benchmark datasets (NTU-RGB+D and Kinet-
ics) demonstrate the effectiveness against the state-of-the-art.
Introduction
As a challenging problem in computer vision, skeleton-
based human action recogntion takes 3d human body co-
ordinates as input and outputs action class, which attracts
increasing attention recently (Wang et al. 2018b). Typically,
human body skeletons characterize the geometric body con-
figuration as rigid body, and their dynamics capture mo-
tion patterns in a continuous way. This dynamic geomet-
ric structure expresses relation among the joints not only
spatially but also temporally. By this means, graph repre-
sentation is the natural way to express the intrinsic human
structure. Therefore, it is crucial to automatically represent
joints on the given graph. Recent success of Spatial Tem-
poral Graph Convolution Networks (ST-GCN) (Yan, Xiong,
and Lin 2018) has justified the effectiveness by a graph
∗
Corresponding author: Xi Li
Copyright
c
2019, Association for the Advancement of Artificial
Intelligence (www.aaai.org). All rights reserved.
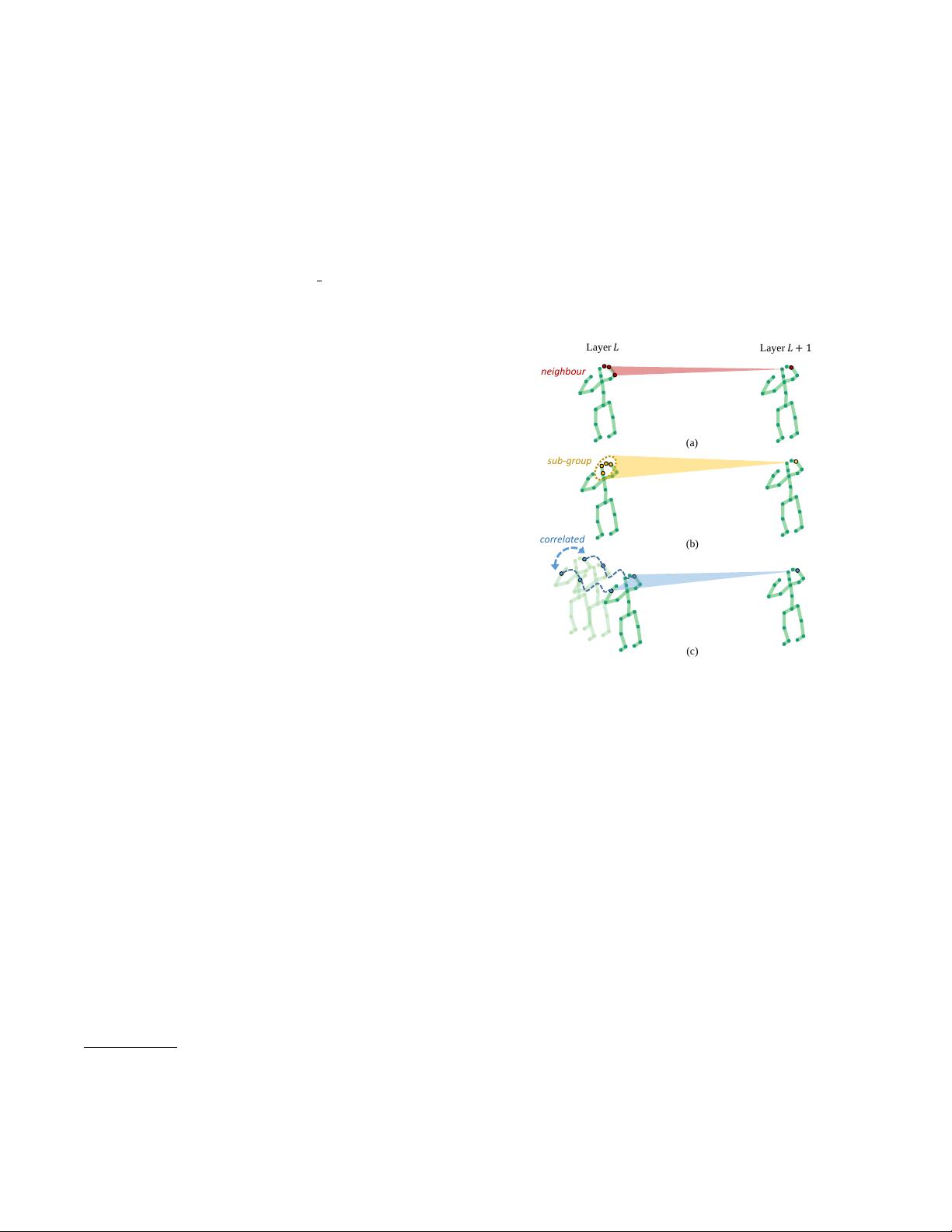
(a)
(b)
(c)
correlated
sub-group
neighbour
Layer 𝐿
Layer 𝐿 + 1
Figure 1: Illustraion of three routing ways: (a) fixed routing
by physical connections; (b) spatial routing by considering
local clustering; (c) temporal routing by modeling the corre-
lation degrees of node trajectories.
aggregation scheme with physical human skeleton, against
the existing literatures such as pseduo images (Wang et al.
2018a; Xie et al. 2018), variants of LSTM (Shahroudy et al.
2016; Song et al. 2017; Liu et al. 2017).
In general, the graph-based method applies a fixed hu-
man skeleton to graph convolution operation and iteratively
aggregates the hidden feature with neighbourhood features.
However, it is challenging to capture changeable human
structure in complex scene. This brings three-fold problems
for further improvement: 1) The skeleton itself is change-
able and depends on specific dataset, e.g., 25 joints in NTU-
RGB+D (Shahroudy et al. 2016) while 18 joints in Kinet-
ics (Kay et al. 2017), resulting in confusion on real human
skeleton; 2) The joint connections are highly unbalanced.
While torso joints become over-smoothing, limb joints may
still be under-smoothing, which causes extreme difficulty on
feature sharing for two limb joints; 3) A global graph struc-
ture is applied to each sample, raising the question “one size
8561
下载后可阅读完整内容,剩余7页未读,立即下载
440 浏览量
877 浏览量
965 浏览量
434 浏览量
2024-11-07 上传
240 浏览量
113 浏览量
374 浏览量
2024-11-07 上传

weixin_38604330
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- ITween插件实用教程:路径运动与应用案例
- React三纤维动态渐变背景应用程序开发指南
- 使用Office组件实现WinForm下Word文档合并功能
- RS232串口驱动:Z-TEK转接头兼容性验证
- 昆仑通态MCGS西门子CP443-1以太网驱动详解
- 同步流密码实验研究报告与实现分析
- Android高级应用开发教程与实践案例解析
- 深入解读ISO-26262汽车电子功能安全国标版
- Udemy Rails课程实践:开发财务跟踪器应用
- BIG-IP LTM配置详解及虚拟服务器管理手册
- BB FlashBack Pro 2.7.6软件深度体验分享
- Java版Google Map Api调用样例程序演示
- 探索设计工具与材料弹性特性:模量与泊松比
- JAGS-PHP:一款PHP实现的Gemini协议服务器
- 自定义线性布局WidgetDemo简易教程
- 奥迪A5双门轿跑SolidWorks模型下载
