基于EAIDK610的无人车:从组装到ROS控制详解
14 浏览量
更新于2024-06-28
2
收藏 14.17MB DOCX 举报
本资源是一份详细的基于EAIDK610无人小车的用户手册,涵盖了自动驾驶、SLAM建图、以及一系列与ROS(Robot Operating System,机器人操作系统)相关的技术。主要内容包括:
1. **自动驾驶基础**:介绍了自动驾驶的概念,涉及通过视觉检测车道和交通标识的技术,以及如何根据环境参数调整摄像头以优化车道识别。
2. **硬件配置**:详细描述了配件清单,如X5车云台摄像头、电池充电器、深度摄像头、两自由度云台、激光雷达等,以及正确的组装步骤,包括云台、舵机和雷达的连接。
3. **ROS基础知识**:
- **网络配置**:学习ROS机器人操作系统的网络配置方法,以及ROS主从机模式的通信方式,强调了SSH(Secure Shell)和终端操作的基础应用。
- **话题机制**:理解ROS中的机关话题( publishers and subscribers)机制,这是数据交换和通信的核心。
4. **室内导航与定位**:AMCL(Artificial Potential Field Method)室内定位技术的应用,以及如何在室内通过自动导航功能让小车移动。同时,涉及到动态避障算法的初步了解。
5. **图形工具使用**:介绍RVIZ(Robot Visualization)图形工具,它用于实时监控和展示机器人传感器数据,以及小车在室内的地图构建。
6. **代码实现**:涉及通过编程实现多个目标导航控制,包括如何通过视觉和环境参数来控制小车的运动。
7. **人脸识别与追踪**:利用人脸识别技术,通过云台追踪人脸位置,这在某些场景下可能作为自主导航的辅助控制手段。
8. **系统启动与控制**:主控端如何启动底盘通信节点和人脸追踪程序,确保小车的稳定运行。
这份文档对于想要深入理解和掌握无人小车技术,尤其是ROS平台上的自动化和人工智能应用的学生或工程师来说,是一份宝贵的参考资料。无论是硬件安装、软件配置,还是高级功能的实现,都能提供清晰的指导和实践步骤。
EAIDK X5 无人车说明书
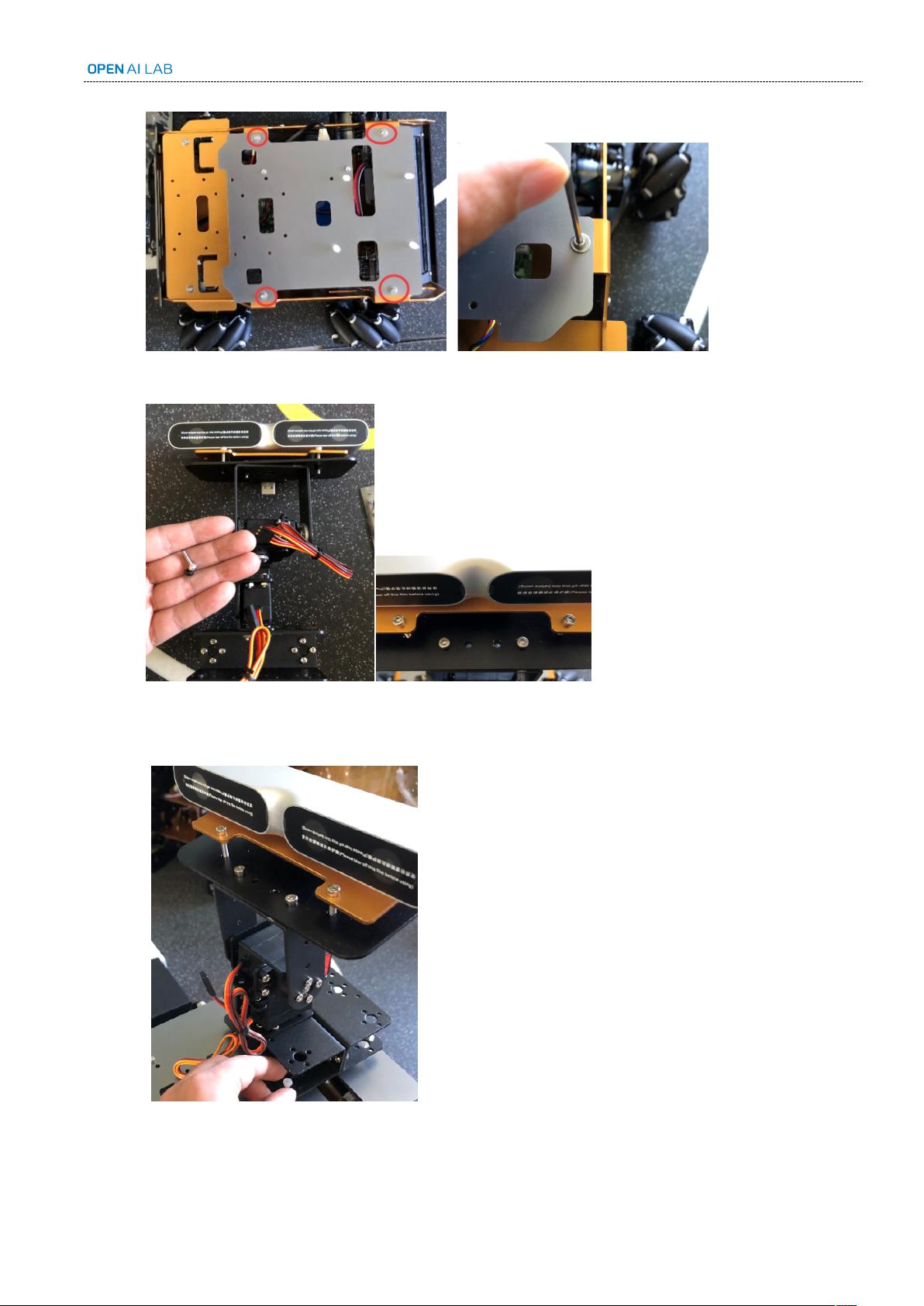
2、 用配件工具里面的螺丝锁好云台与摄像头,然后撕掉上面的保护膜。
3、 锁好云台到车板上,一定是云台舵机有线一侧在前方,后面舵机需要接到电机
驱动板侧。
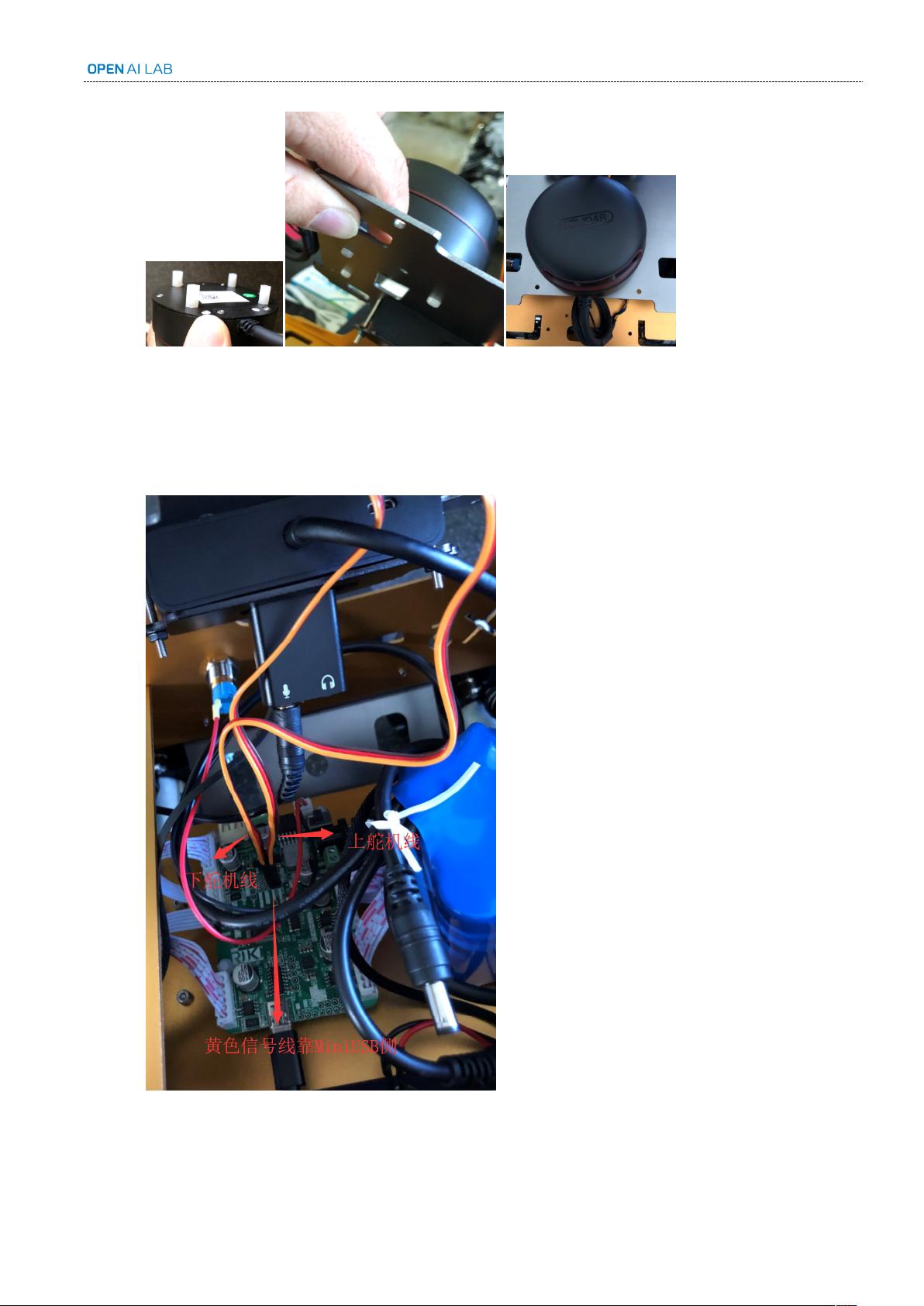
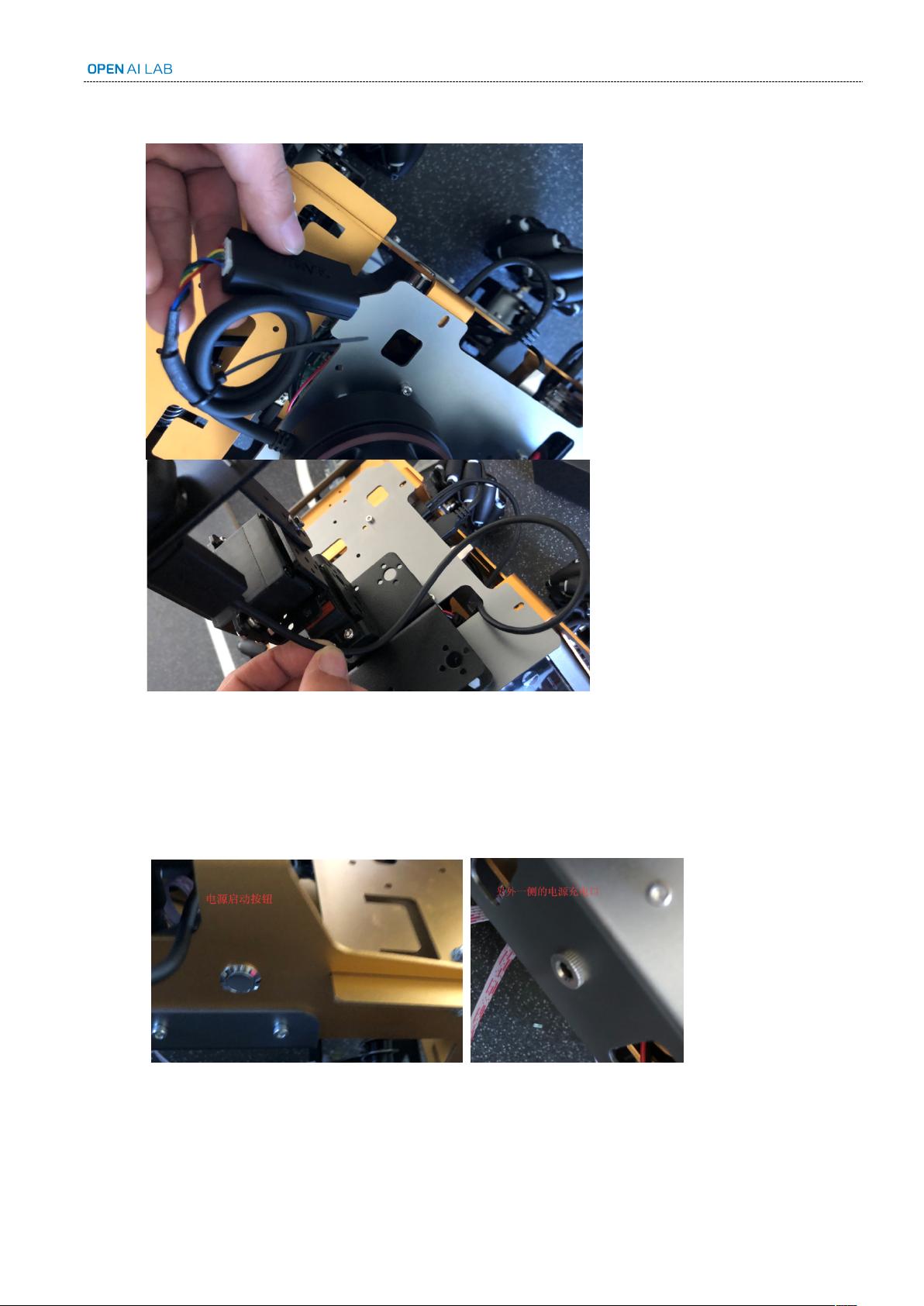
4、 锁雷达,用塑料柱先锁好支柱,然后在用螺丝锁到前板的定位孔上,接好后,
雷达有线一端朝车头方。
剩余56页未读,继续阅读
2024-10-10 上传
2023-08-26 上传
2021-07-12 上传
2022-11-28 上传
2021-08-07 上传
2021-09-07 上传
2024-10-30 上传
2023-07-06 上传









