KUKA机器人与西门子PLC通过Profibus的通信配置指南
版权申诉
本文档详细介绍了如何配置KUKA机器人通过Profibus协议与西门子PLC进行通信,包括所需硬件、软件设置以及配置步骤。
KUKA机器人与西门子PLC之间的通信是通过Profibus协议实现的,这是一种广泛使用的工业现场总线标准,允许不同设备间的高速数据交换。在本配置中,KUKA机器人使用了BECKHOFF的EL6731-0010从站模块作为通信接口,并配合总线耦合器EK1100,以便连接到Profibus网络。首先,确保下载并拥有正确的配置文件GSD_EL6731.zip,这是对EL6731-0010从站模块进行配置所必需的。
配置过程中,需要将KUKA机器人控制柜的KLI接口通过网线连接到电脑,确保两者处于同一IP子网内。KUKA机器人的默认IP是172.31.1.147,电脑的IP应设置为172.31.1.X(X为147以外的值),都使用255.255.0.0作为子网掩码。
接下来,使用WorkVisual软件进行配置。打开软件后,通过“导入设备说明文件”功能引入GSD_EL6731配置文件。然后,在“KUKAExtensionBus(SYS-44)”下添加总线耦合器EK1100,接着在EK1100上添加EL6731-0010PROFIBUSDPSlave从站模块,最后在该从站模块上添加实际的通信设备PIEL6731-0010。
通过以上步骤,KUKA机器人便能成功地与西门子PLC建立Profibus通信,实现两者之间的数据交换。这种通信方式对于实现自动化生产线中的精确控制和协调至关重要,例如在机器人执行拾取、放置等任务时,需要实时接收和发送来自PLC的指令和状态信息。
在实际应用中,可能还需要根据具体的PLC型号和程序要求,配置PLC侧的Profibus通信参数,如站地址、波特率等,以确保通信的稳定性和效率。同时,为了确保系统的安全和可靠性,应定期检查硬件连接和软件配置,及时更新固件和驱动程序,以适应最新的技术发展。
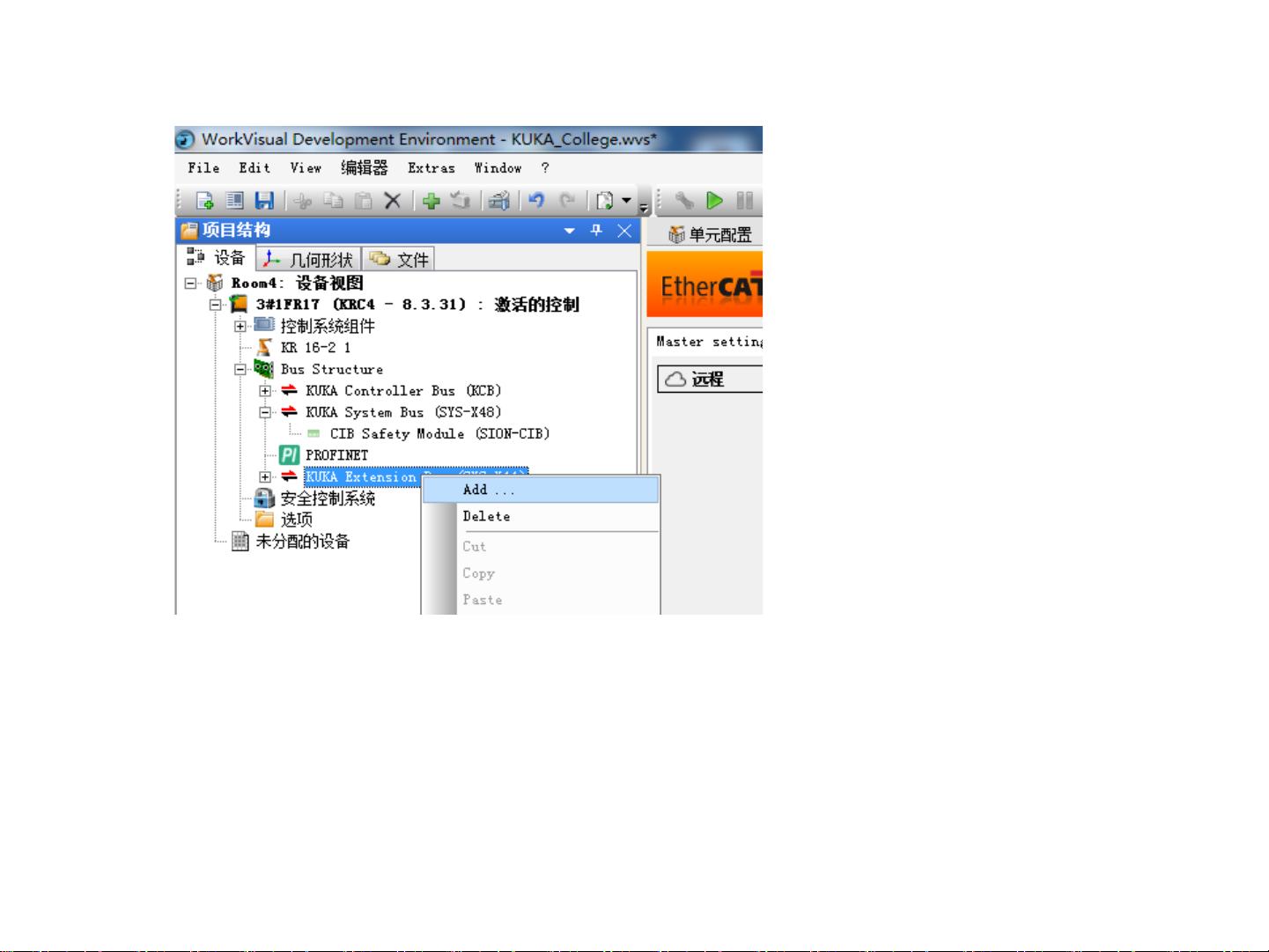
3)在“KUKA Extension Bus(SYS-44)”添加总线耦合器EK1100。“KUKA Extension Bus(SYS-44)”扩展总线右击,选择“ADD”, 如图8所示。
选择“EK1100 EtherCAT Coupler(2A E-Bus)”,选择“确定”,添加总线耦合器EK1100,如图9所示。
图8
剩余29页未读,继续阅读
2018-11-01 上传
2021-04-20 上传
2021-09-27 上传
2019-09-12 上传
2022-06-18 上传
2021-09-29 上传
2022-06-17 上传

发发发E=mc²
- 粉丝: 1
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







