四元数与三维旋转的直观解析与MATLAB实现
需积分: 8 94 浏览量
更新于2024-07-08
收藏 478KB PDF 举报
本篇文章深入探讨了四元数(Quaternion)在三维旋转中的应用,作者试图提供一种基于几何学和线性代数的直观理解,以便于计算机图形学和相关领域的读者。不同于网上的许多代数化讲解,文章强调的是四元数与3D旋转的几何关联,而不是抽象的数学理论。
首先,文章从复数(Complex Number)的概念和性质入手,指出四元数与复数有许多相似之处,了解复数的基本概念如实部和虚部、复数的线性表示形式(即复平面上的向量表示),有助于更好地理解四元数。作者提到了复数可以表示为 \( z = a + bi \),其中 \( a \) 是实部,\( b \) 是虚部,且 \( i^2 = -1 \)。
接下来,文章通过将复数看作是向量 \( \begin{pmatrix} a \\ b \end{pmatrix} \) 的形式,展示了复数如何与2D旋转关联,这为后续讨论三维空间中的旋转奠定了基础。作者提到,由于四元数与复数类似,这些基本的几何思想可以被扩展到三维,特别是通过引入额外的分量来表示旋转。
在主体部分,作者重点阐述了四元数的构造和与三维旋转的关系。四元数通常表示为 \( q = w + xi + yj + zk \),其中 \( w \) 代表实部,而 \( x, y, z \) 分别对应三维空间中的三个正交轴。四元数不仅能够紧凑地表示旋转角度,还能同时处理旋转中心和旋转轴,这是标准三维旋转矩阵无法做到的。通过分解四元数,可以方便地进行旋转的加法和复合,这对于计算机图形学中的旋转变换操作至关重要。
尽管文章针对的是计算机图形学的应用背景,但对于物理学家或抽象代数研究者,部分内容可能不够深入。然而,文章结尾推荐了一些拓展阅读材料,可以帮助他们从不同角度理解四元数。作者还分享了MATLAB/Octave代码示例和动画,以及关于版权的规定,鼓励读者在遵循协议的前提下进行交流和学习。
这篇文档提供了四元数在三维旋转中的实用性和直观解释,通过与复数的类比,使读者能更好地掌握这种重要的数学工具在计算机图形学领域的实际应用。
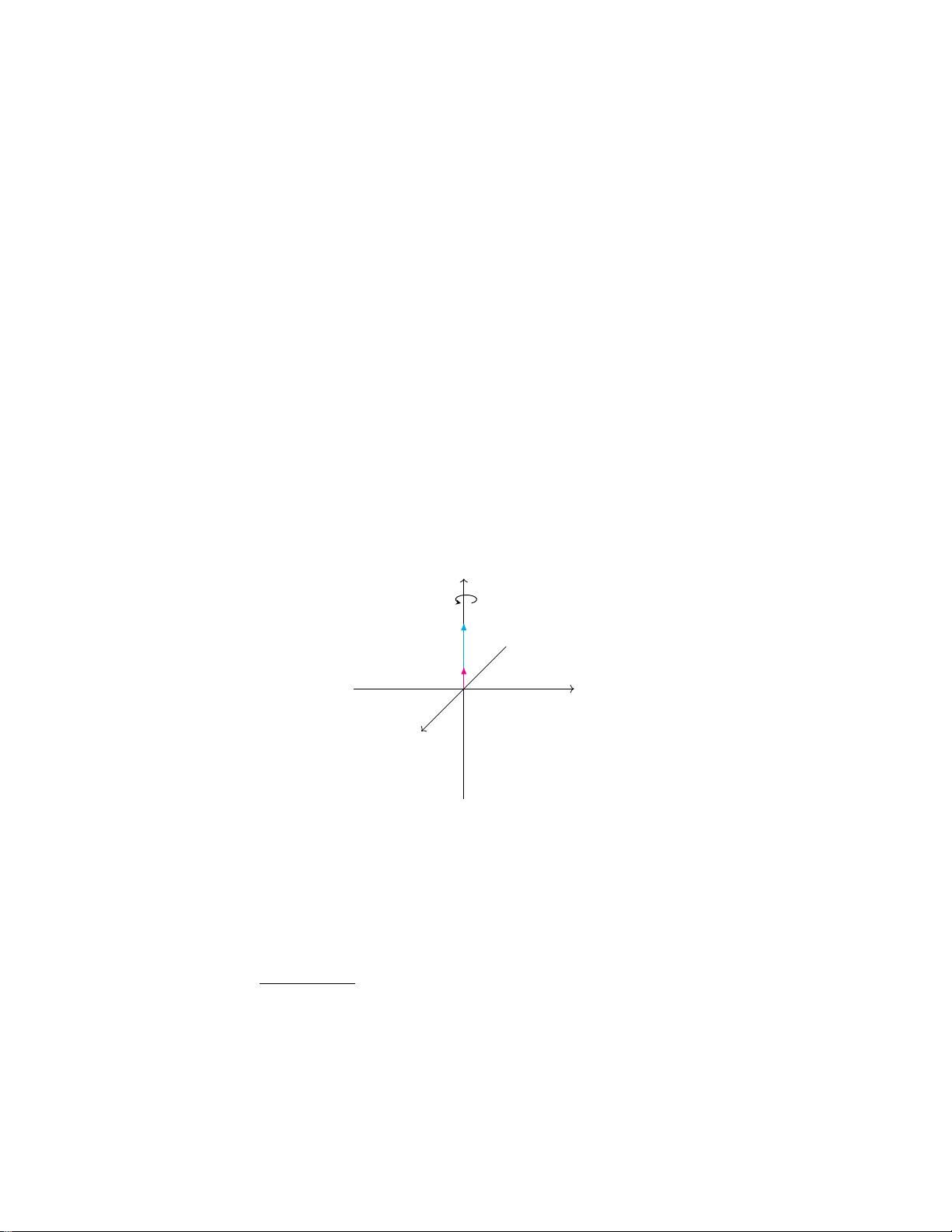
注意,在这篇教程中我们将使用右手坐标系统,并且我们将使用右手定则
来定义旋转的正方向.你可以将右手拇指指向旋转轴 u 的正方向,这时其它
四个手指弯曲的方向即为旋转的正方向.在上图中即为逆时针方向.对于左
手坐标系情况的讨论请见第 9 章.
在轴角的表示方法中,一个旋转的定义需要使用到四个变量:旋转轴 u 的
𝑥, 𝑦, 𝑧 坐标,以及一个旋转角 θ,也就是我们一共有四个自由度 (Degree of
Freedom).这很明显是多于欧拉角的三个自由度的.实际上,任何三维中的旋
转只需要三个自由度就可以定义了,为什么这里我们会多出一个自由度呢?
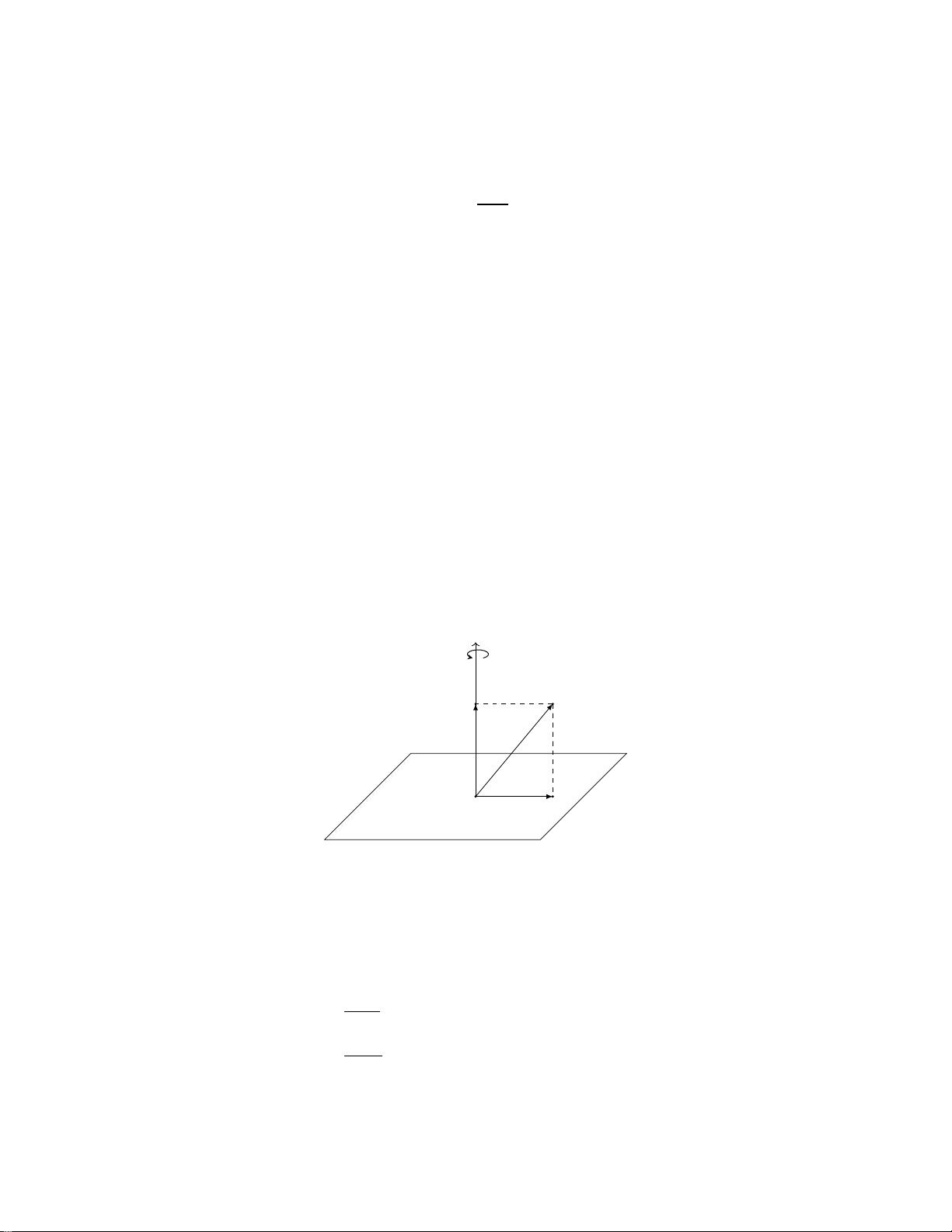
其实,在我们定义旋转轴 u 的 𝑥, 𝑦, 𝑧 坐标的同时,我们就定义了 u 的模
长(长度).然而,通常情况下,如果我们说绕着一个向量 u 旋转,我们其实
指的是绕着 u 所指的方向进行旋转.回忆一下向量的定义:向量是同时具有
大小和方向的量,但是在这里它的大小(长度)并不重要.我们可以说绕着
u
1
= (0, 0, 1)
𝑇
这个轴进行旋转,也可以说绕着 u
2
= (0, 0, 3)
𝑇
旋转.虽然这
两个向量完全不同,但是它们指向的都是同一个方向(即 𝑧 轴的方向):
𝑦
𝑧
𝑥
u
2
u
1
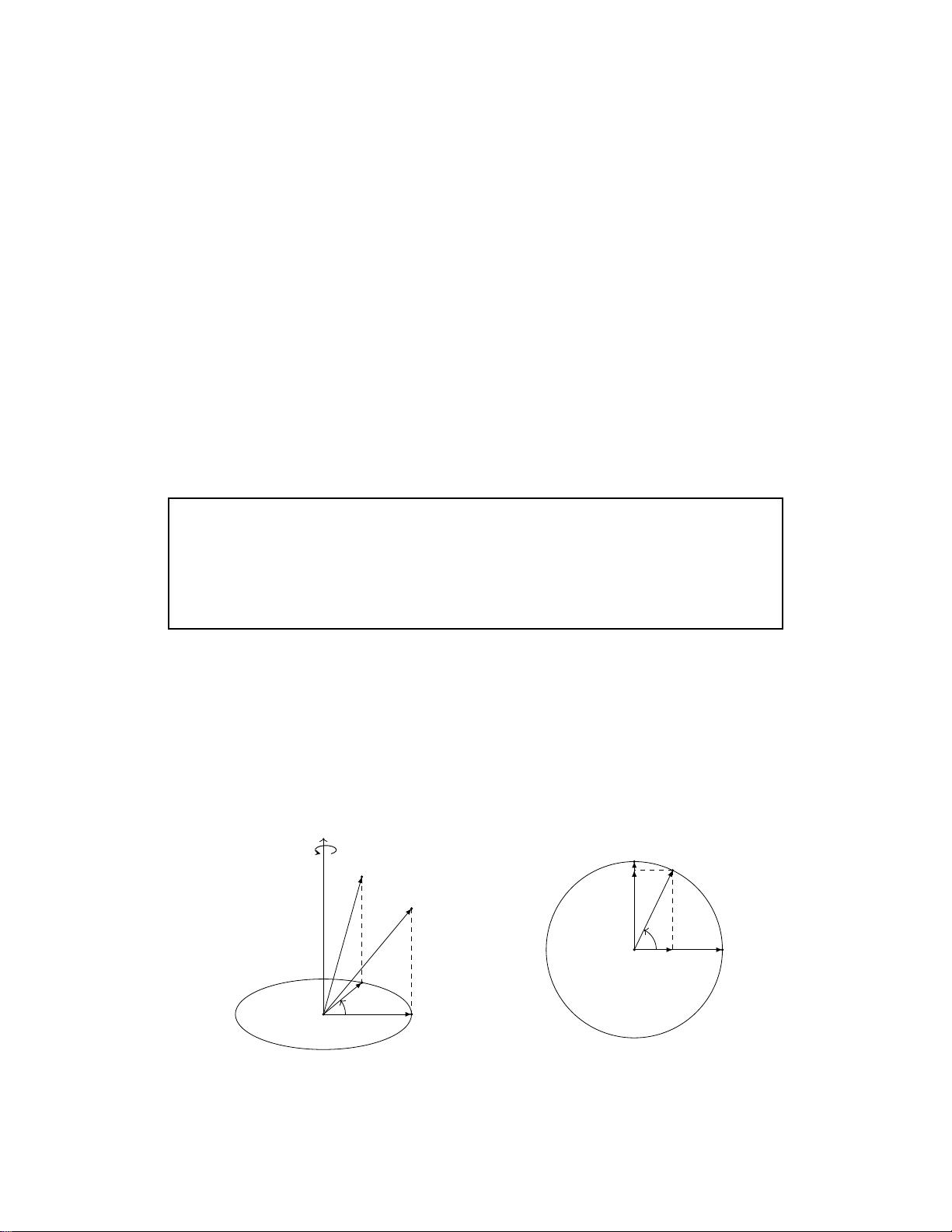
在三维空间中定义一个方向只需要用到两个量就可以了(与任意两个坐标
轴之间的夹角).最简单的例子就是地球的经纬度,我们仅仅使用经度和纬
度两个自由度就可以定义地球上任意一个方位.而如果我们要表示某一个方
位上的特定一个点,则还需要添加海拔这个自由度.
为了消除旋转轴 u 模长这个多余的自由度,我们可以规定旋转轴 u 的模长
为 ∥u∥ =
p
𝑥
2
+ 𝑦
2
+ 𝑧
2
= 1,也就是说 u 是一个单位向量.这样一来,空间
中任意一个方向上的单位向量就唯一代表了这个方向.我们其实可以将模长
规定为任意的常量,但是规定 ∥u∥ = 1 能为我们之后的推导带来很多的便利,
这也是数学和物理中对方向定义的惯例.
12
剩余72页未读,继续阅读
2019-03-05 上传
2019-05-29 上传
2020-08-18 上传
2021-11-04 上传
2020-01-19 上传
2022-11-11 上传
2020-08-25 上传
2020-12-09 上传
2019-06-10 上传

CJ_S_01235
- 粉丝: 26
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 离心泵水力设计对振动的影响.rar
- 网站:工作进行中。
- 2018秋招java笔试题-awesome-Algorithm:真棒算法
- vu-greatmods:《战地风云3》 VU Mods
- creative-apartments
- protobuf-java-2.5.0-API文档-中文版.zip
- Guessing_Game
- dotfiles-wsl
- ANGRY-BIRDS-STAGE-6
- dotenorio.now.sh:我现在的个人资料▲
- chrome-apps-extensions-developer-tools:ohmmkhmmmpcnpikjeljgnaoabkaalbgc
- 3-成绩评定表.zip
- ctt
- VisionEval.org:VisionEval项目的主页
- my cosde.rar
- Angular-2.0-Five-Min-Quickstart:Angular 仍处于未打包状态且处于 alpha 阶段。 本快速入门不反映 Angular 的最终构建过程
