轮式玻璃清洁机器人:结构设计与创新
版权申诉
"玻璃清洁机器人结构设计"
玻璃清洁机器人是一种专门用于清洁高层建筑玻璃幕墙的自动化设备,旨在解决高空作业的安全问题和提高清洁效率。目前,由于技术限制,市场上的此类机器人仍处于发展阶段,面临着许多实际应用中的挑战。本设计针对这些问题,深入研究了玻璃清洁机器人的工作原理和设计策略,以期提出一种既成熟又具有市场潜力的解决方案。
首先,设计的核心是选择合适的运动方案。经过多轮方案规划和论证,决定采用轮式自主移动机器人为基础平台。这种设计的优势在于轮式结构能提供良好的移动性和稳定性,同时,自主移动能力确保了机器人能在玻璃墙面上灵活行进和避开障碍。
在结构设计中,行走机构是关键。机器人通过一对传动齿轮将驱动电机的动力传递至驱动轴,进而驱动两个后轮旋转,实现沿玻璃墙面的行走。前轮则采用嵌入式直接驱动装置,这种设计不仅在直线行驶时提供牵引力,还能在遇到障碍时通过正反向电机控制,实现零转弯半径转向,增加了机器人的灵活性。
转向和自动避障机构是另一大亮点。当机器人探测到前方有障碍物时,通过传感器反馈信息,控制系统会指令相应的电机反转,使机器人能够快速、精准地改变方向,避免碰撞。这种智能避障功能大大提升了机器人的安全性和工作效率。
清洗机构采用了滚桶式设计,由驱动电机直接驱动,无减速机构,确保滚桶转速与电机同步,保证了清洁效率。滚桶上的清洁刷可以有效清除玻璃表面的污渍,同时,通过调整电机转速,可以调节清洁力度,适应不同清洁需求。
此外,为了提升用户体验和市场竞争力,设计中还强调了创新。例如,可能包括改进清洁剂的分配系统,使其更加均匀且节约资源;优化控制系统,提高机器人的自主决策能力;或者增强通信功能,使用户能远程监控和控制机器人的工作状态。
总结来说,这个玻璃清洁机器人设计方案综合考虑了运动性能、安全性、清洁效果和智能化程度,通过不断优化和完善,旨在创造一款既能有效清洁玻璃幕墙,又能适应复杂环境的高效清洁机器人。关键词如“轮式”、“玻璃”、“滚桶”、“嵌入式直接驱动装置”和“正反转”等,突出了设计的关键技术和特点。

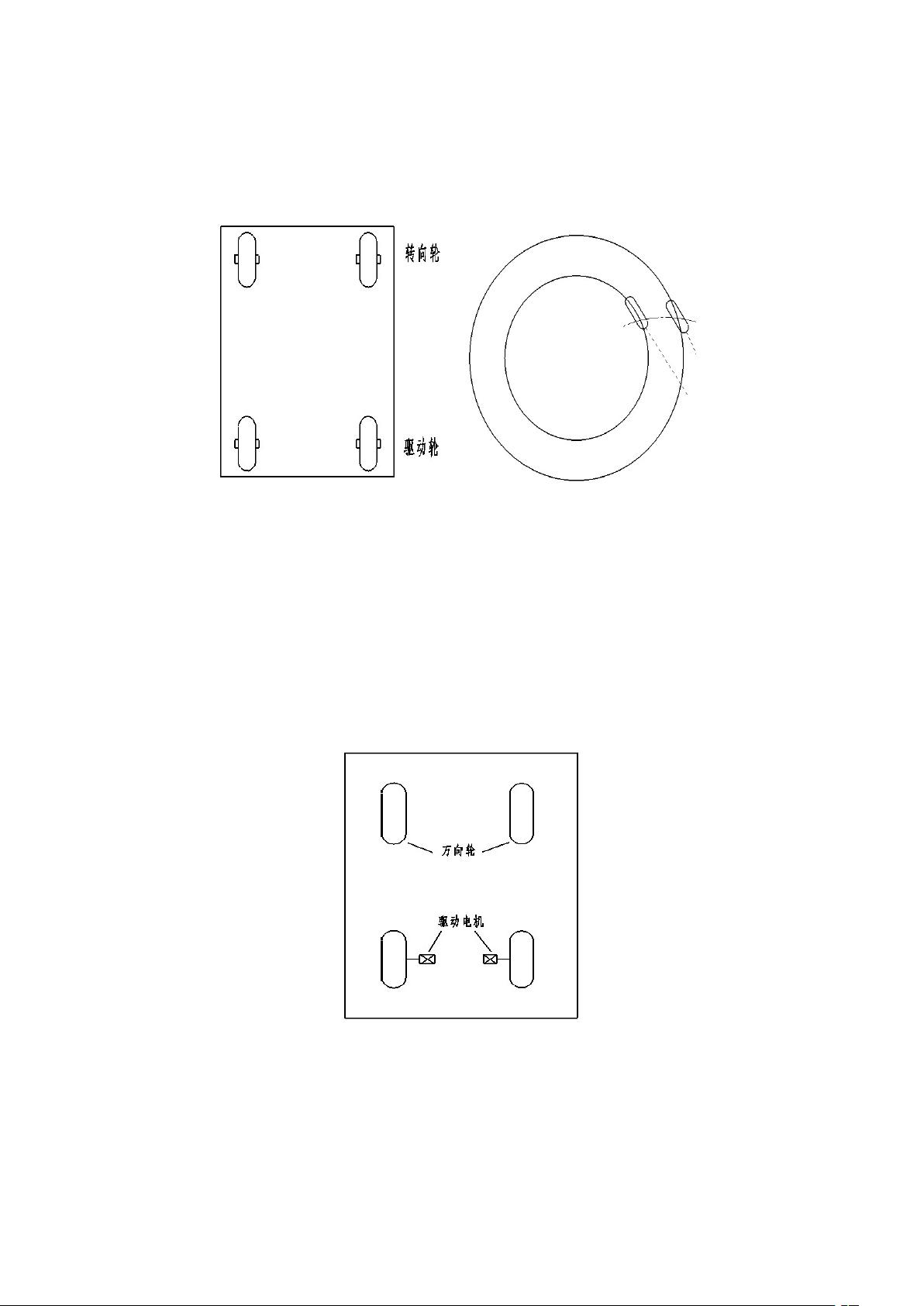
现以自身为圆心的旋转运动。在机器人底盘的前方安装一个从动轮的前轮系统,用于对
本体进行支撑。因为两个后轮共用一个轴,而在实际应用中两个车轮的对应不一定非常
精确。在实际的应用中,通常的做法是将底盘设计成梯形,使机器人转向具有较好的灵
活性和稳定性。
图 2-4 共轴驱动行走机构
实际的应用中,因为只有 3 个车轮,该机器人在行走时易发生倾覆,所以在很多复
杂条件下,它是不能正常完成任务的。
②全方位移动机构
全方位移动机构是一种比较特殊的车轮,如图 2-5 所示,3 个主轮互相之间成 60
0
图 2-5 全方位移动机构
夹角,轴线与中线重合。之所以选择 3 个万向轮正三角组合,是因为正三角形组合方式
有它独特的优势。因为三点确定一个平面,无论怎样,3 个点总是在同一平面上,即无
论什么情况,3 个多向轮都必然着地,不会出现某个轮悬空的情况,这是四轮或更多轮
的行走机构无法做到的。但是该机构所使用的轮子较特殊,制作复杂不适于实际的广泛
运用。
⑵ 四轮移动方式
①四轮驱动方式

剩余51页未读,继续阅读
126 浏览量
2023-07-11 上传
2023-07-13 上传
2023-07-11 上传
2021-10-01 上传
2023-07-15 上传
2023-07-11 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- OpenCD:ПростоеприложениедляоткрытияизакрытияCD-иDVD-ROM'ов
- jQuery图片拖拽排序
- pdb2mdb.rar
- frontend-sass
- HouseMonitorPi:树莓派建造的家庭环境监控系统,可以监测室内温湿度,室内空气质量,甲醛浓度
- 今日家园商业街景观施工图
- 行业文档-设计装置-一种揿动圆珠笔.zip
- rt-thread-code-stm32f103-ys-f1pro.rar,stm32f103-ys-f1pro
- holbertonschool-low_level_programming:学习C和较低级别的编程
- django_project
- Gallager LDPC:常规LDPC结构-matlab开发
- pgame:受Self,Smalltalk等人启发,涉及游戏和基于原型的编程的一些想法。
- MinGW64离线安装包(gcc-5.3),适用于MATLAB R2017b and R2018a
- trueskill:适用于Python的TrueSkill评分系统的实现
- iOS Swift记忆益智游戏Memory Game完整源码
- 简单的订机票系统
