1Gb DDR3 SDRAM技术规格与特性分析
需积分: 33 160 浏览量
更新于2024-07-19
收藏 8.25MB PDF 举报
"本文档介绍了1Gb DDR3 SDRAM内存模块,主要由镁光公司生产。该内存采用双倍数据速率架构,具有高效率和高速度特性。详细规格包括不同封装选项(x4, x8, x16),电压、接口类型、内部银行数量、预取架构、时序参数等,并提到了自刷新模式和工作温度范围。"
DDR3 SDRAM,即第三代同步动态随机存取内存,是内存技术的一个重要里程碑。它在DDR2的基础上进行了改进,以提供更高的数据传输速度和更低的功耗。1Gb DDR3内存芯片有多种组织结构,如MT41J256M4(32 Meg x4 x8 Banks)、MT41J128M8(16 Meg x8 x8 Banks)和MT41J64M16(8 Meg x16 x8 Banks),这些不同的型号满足了不同应用场景的需求。
1. **双倍数据速率架构**:DDR3 SDRAM的名称来源于其数据传输机制,即在每个时钟周期的上升沿和下降沿都传输数据,实现了比DDR2更高的数据传输速率。8n-prefetch架构意味着每个时钟周期内部核心处理8n位宽的数据,而在I/O引脚处则以n位宽进行半时钟周期的数据传输,从而提高了数据吞吐量。
2. **电压与接口**:DDR3的工作电压为1.5V,相比DDR2的1.8V显著降低,有助于减少功耗。I/O接口采用中心终止的推挽式,同时具有差分双向数据 strobe 和差分时钟输入(CK, CK#)。
3. **内部架构**:内存模块包含8个内部银行,这允许并行访问,进一步提高了性能。此外,还包括了对数据、 strobe 和 mask 信号的名义和动态开路终止(ODT)功能。
4. **时序参数**:CAS(读取)延迟(CL)可选5到11个时钟周期,POSTED CAS ADDITIVE latency(AL)可以是0或CL减1或2。CAS(写入)延迟(CWL)基于时钟周期数,范围从5到8。固定突发长度(BL)为8,可通过模式寄存器集(MRS)启用突发切分(BC4)功能。还可以在运行时选择BC4或BL8。
5. **自刷新模式和工作条件**:DDR3支持自刷新模式,可以在不消耗大量系统资源的情况下保持数据完整性。工作温度范围为0°C到95°C,其中在0°C到85°C范围内需要每64毫秒刷新8,192次,在85°C到95°C之间则需每32毫秒刷新一次。
6. **可选功能**:DDR3内存允许用户在运行时动态选择突发长度(BL)为4或8,这称为OTF(On-the-fly)选择,增加了设计的灵活性。
镁光保留更改产品规格的权利,因此用户在实际应用中应参考最新的产品手册以获取最新信息。这些内存模块广泛应用于计算机系统、服务器、网络设备等,为高性能计算提供了坚实的基础。
PDF: 09005aef826aa906/Source: 09005aef82a357c3 Micron Technology, Inc., reserves the right to change products or specifications without notice.
1Gb_DDR3_D2.fm - Rev. F 11/08 EN
16 ©2006 Micron Technology, Inc. All rights reserved.
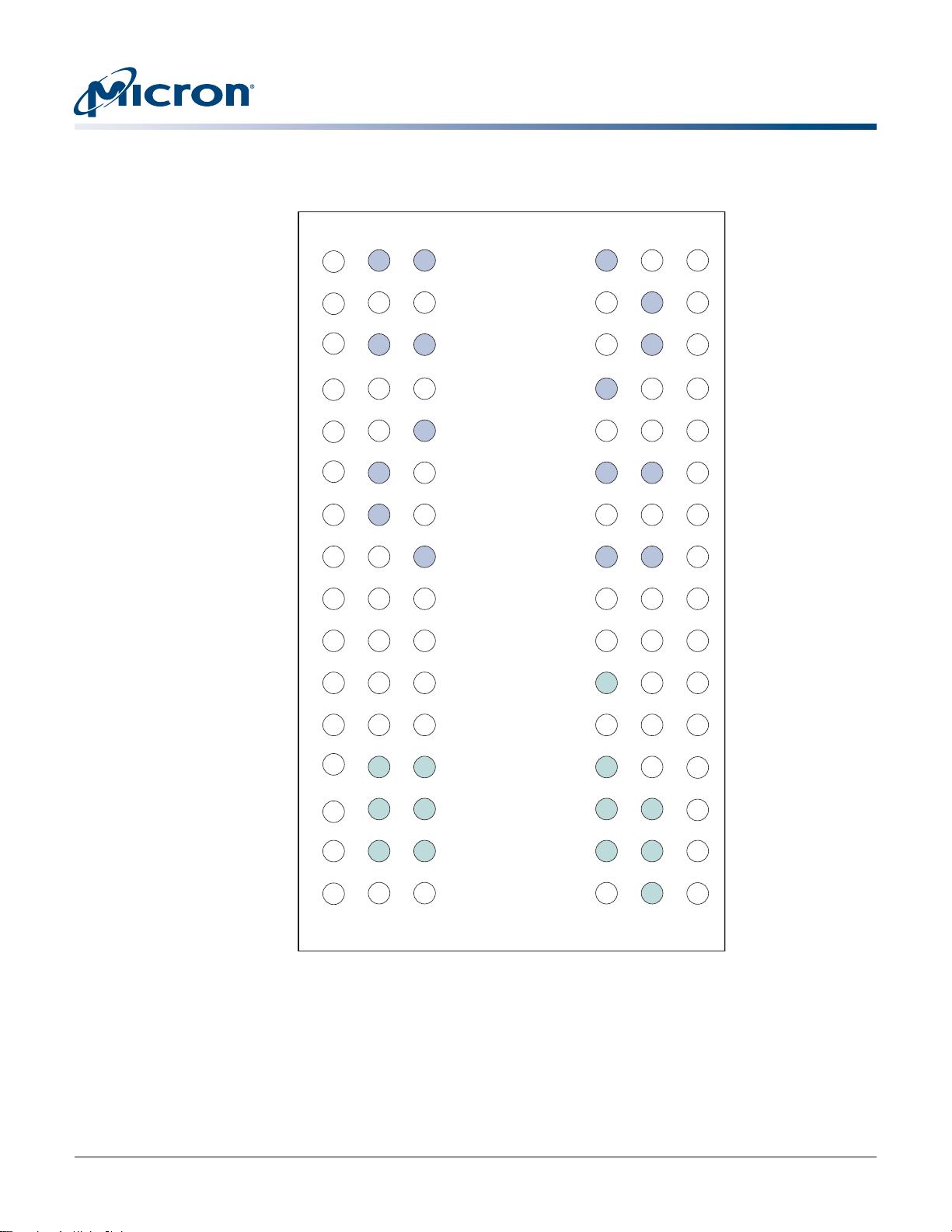
1Gb: x4, x8, x16 DDR3 SDRAM
Ball Assignments and Descriptions
Figure 8: 96-Ball FBGA – x16 Ball Assignments (Top View)
Notes: 1. Ball descriptions listed in Table 5 on page 21 are listed as “x4, x8” if unique; otherwise, x4
and x8 are the same.
2. A comma separates the configuration; a slash defines a selectable function.
3. Example D7 = NF, NF/TDQS#. NF applies to the x4 configuration only. NF/TDQS# applies to
the x8 configuration only—selectable between NF or TDQS# via MRS (symbols are defined
in Table 5 on page 21).
1234 6 7895
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
VDDQ
V
SSQ
V
DDQ
V
SSQ
V
SS
VDDQ
V
SSQ
V
REFDQ
NC
ODT
NC
V
SS
VDD
VSS
VDD
VSS
DQ13
V
DD
DQ11
V
DDQ
V
SSQ
DQ2
DQ6
V
DDQ
V
SS
VDD
CS#
BA0
A3
A5
A7
RESET#
DQ15
V
SS
DQ9
UDM
DQ0
LDQS
LDQS#
DQ4
RAS#
CAS#
WE#
BA2
A0
A2
A9
NC
DQ12
UDQS#
UDQS
DQ8
LDM
DQ1
V
DD
DQ7
CK
CK#
A10/AP
NC
A12/BC#
A1
A11
NC
VDDQ
DQ14
DQ10
V
SSQ
V
SSQ
DQ3
V
SS
DQ5
V
SS
VDD
ZQ
V
REFCA
BA1
A4
A6
A8
VSS
VSSQ
V
DDQ
V
DD
VDDQ
V
SSQ
V
SSQ
V
DDQ
NC
CKE
NC
V
SS
VDD
VSS
VDD
VSS
http://www.BDTIC.com/Micron
剩余180页未读,继续阅读
2011-07-21 上传
2022-12-24 上传
180 浏览量
274 浏览量
132 浏览量
125 浏览量
点击了解资源详情

qq_22943035
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- AVR单片机C语言编程实战教程
- MATLAB实现π/4-QDPSK调制解调技术解析
- Rust开发微控制器USB设备端实验性框架介绍
- Report Builder 12.03汉化文件使用指南
- RG100E-AA U盘启动配置文件设置指南
- ASP客户关系管理系统的联系人报表功能解析
- DSPACK2.34:Delphi7控件的测试与应用
- Maven Web工程模板 nb-parent 评测
- ld-navigation:革新Web路由的数据驱动导航组件
- Helvetica Neue字体全系列免费下载指南
- stylelint插件:强化CSS属性值规则,提升代码规范性
- 掌握HTML5 & CSS3设计与开发的关键英文指南
- 开发仿Siri中文语音助理的Android源码解析
- Excel期末考试复习与习题集
- React自定义元素工具支持增强:react-ce-ubigeo示例
- MATLAB实现FIR数字滤波器程序及MFC界面应用
