哈夫变换在2D/3D几何映射与机器人视觉中的应用
需积分: 10 144 浏览量
更新于2024-09-11
收藏 2MB PDF 举报
"这篇文章探讨了2D和3D哈夫变换在机器人视觉中的应用,结合共形几何代数来构建3D几何地图,利用线条和面的几何实体进行自我定位和地图匹配。通过将几何哈夫表示与共形几何代数框架联系起来,可以有效地进行伴随几何计算,以发现用于探索、导航、重新定位和避障的3D视觉空间中的几何约束。这种方法对2D和3D几何模式识别具有重要意义。"
哈夫变换是一种在图像处理领域广泛使用的边缘检测技术,它能够从图像中检测出直线或者曲线的存在。哈夫变换的基本原理是将图像空间中的像素点映射到参数空间中的直线或曲线参数,通过对参数空间的累加投票,找出累积值最高的参数,从而确定图像中的边缘。在2D图像中,哈夫变换通常用于检测直线,而在3D场景中,它可以扩展到检测平面。
2D哈夫变换通常处理的是像素在X-Y平面上的分布,通过对每个像素的斜率和截距参数进行累加,形成一个参数空间(通常是斜率-截距空间),在该空间中找到峰值,对应于图像中的直线。3D哈夫变换则更为复杂,需要考虑三个维度的参数,如平面的法向量和距离,以检测图像中的平面。
共形几何代数是一种强大的数学工具,它提供了一种统一的方式来处理几何对象,包括线、面、旋转和平移等。将哈夫变换与共形几何代数结合,可以更直观地表示和操作3D空间中的几何信息,简化计算过程,并能有效地处理复杂的几何关系。
文章提出了一种新的机器人自我定位方法,即在哈夫域进行地图匹配。这种方法利用检测到的线条和面的代数关系来寻找几何约束,这些约束对于理解3D环境中的特定配置至关重要。例如,在机器人探索、导航时,识别出墙壁、走廊或其他结构可以帮助它们准确地定位自身位置,规划路径,避免障碍物。
同时,共形几何代数的使用使得计算伴随几何变得简单,即通过线条和面的相交关系来推断环境的结构。这种推断对于解决同时定位与建图(SLAM,Simultaneous Localization and Mapping)问题特别有用,因为它们可以提供额外的约束条件,增强SLAM算法的鲁棒性和精度。
这篇论文展示了哈夫变换与共形几何代数的结合如何提升机器人视觉系统的能力,特别是在3D环境中识别和理解几何模式。这种方法不仅适用于图像处理,还有助于开发更先进的机器人技术,如自主导航和避障。其理论和实践价值对进一步的机器人视觉研究和应用具有深远的影响。
equations and for linear transformations one uses matrix represen-
tation with redundant coefficients. In contrast, conformal geomet-
ric algebra, a coordinate-free system, provides a fruitful description
language to represent primitives and constraints in any dimension,
and by using successive reflections with bivectors, one builds ver-
sors to carry out linear transformations avoiding redundant
coefficients.
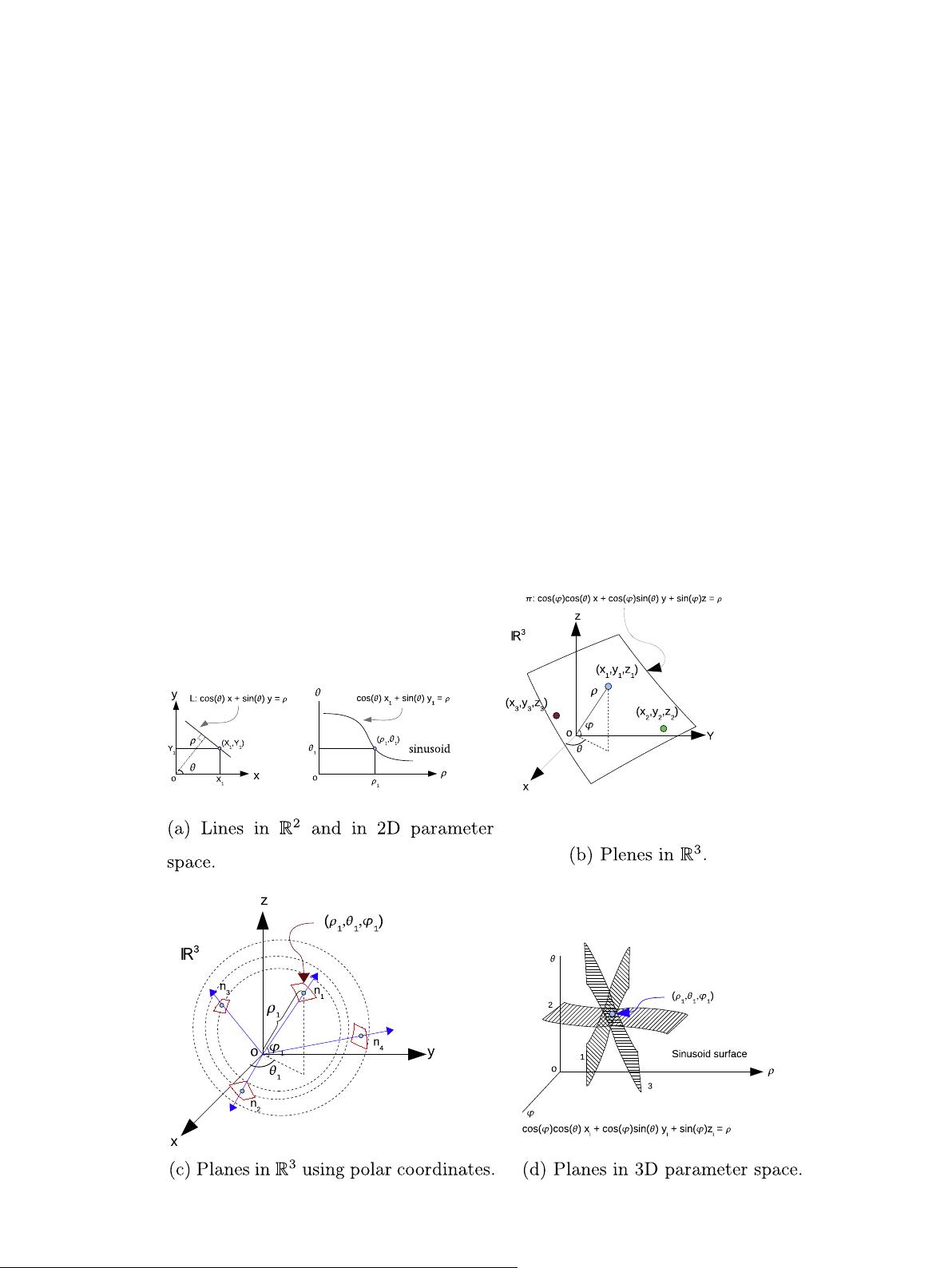
3. Hough transform: overview
The Hough Transform (Hough, 1962) is an effective method to
identify the location and orientation of lines (Duda and Hart,
1972). Next we describe the 2D, 3D and the relation of Hough
space and Conformal Geometry Algebra.
3.1. 2D Hough transform
The Hough Transform is the mapping of a line L of R
2
into a sin-
gle point in the 2D Hough space (h,
q
), where
q
2 R and h 2 [0, 2
p
).
The equation describing a line L in R
2
is given by
L : y ¼ ax þ b; ð6Þ
where the scalars a, b are the line parameters. This line L can then be
represented in the parameter space as a point with coordinates
(a,b). In an opposite way, a point ðx
i
; y
i
Þ2R
2
can be represented
in the parameter space as a line L
0
as follows:
L
0
: b ¼x
i
a þ y
i
; ð7Þ
where x
i
; y
i
2 R are the parameters of the line L
0
. Consider p
1
, p
2
, ...,
p
n
, a set of points lying on L. Each of these points represents a line in
the parameter space. Thus, the intersection of these lines in the
parameter space corresponds to the point a
i
, b
i
, which in turn rep-
resents the parameters of the line L in the R
2
. For the case of x = con-
stant in Eq. (7), the y-axis coefficient equals 0. One way to go around
this problem is to resort to the normal form of the line equation: L :
cos(h)x + sin(h)y =
q
, where h and
q
are the parameters of the normal
to the line passing through the origin in R
2
; see Fig. 1a. Thus, one
point ðx
i
; y
i
Þ2R
2
represents a sinusoid in the parameter space;
see Fig. 1a. The points (x
i
,y
i
) lying on a line L in R
2
represent a sinu-
soid, which intersect in just one point (h,
q
) in the parameter space.
This point represents the line L : cos(h)x + sin(h)y =
q
.
So far, we have defined a function that maps a line in R
2
to a
point in the Hough space. Let be L 2 R
2
as defined in (6), the Hough
Transform function can be defined as HT(L) ? (h,
q
). An interesting
property (Iocchi et al., 2001), that will be useful in the following
sections, is in the relation between the transformations of lines
when the robot moves.
Property 1. Given the Hough Transform of a set of lines L, sensed by
the mobile robot, and a rotation/translation (T
x
,T
y
,h
R
) of the robot (we
assume h
R
2 [0, 2
p
)), the Hough Transform of the L with respect to the
new pose of the robot will be HT(L) ? (h
0
,
q
0
) such that:
Fig. 1. 2D and 3D Hough Transform representation.
M. Bernal-Marin, E. Bayro-Corrochano / Pattern Recognition Letters 32 (2011) 2213–2223
2215
系数
多余的
参数
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-15 上传
2021-05-30 上传
2021-06-01 上传

ChenTi007
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
