ROS教程:键盘操控小海龟实现Publisher-Subscriber通信
版权申诉
本文档详细介绍了如何在Robot Operating System (ROS)环境中,通过键盘控制小海龟(turtlesim)的运动,并实现话题发布者(Publisher)与订阅者(Subscriber)的功能。主要内容分为以下几个步骤:
1. **启动小海龟及其键盘控制**:首先,用户需要在命令行中运行`$roscore`启动ROS核心节点,然后启动`turtlesim`节点和`turtle_teleop_key`节点,分别对应小海龟仿真和键盘控制的交互。
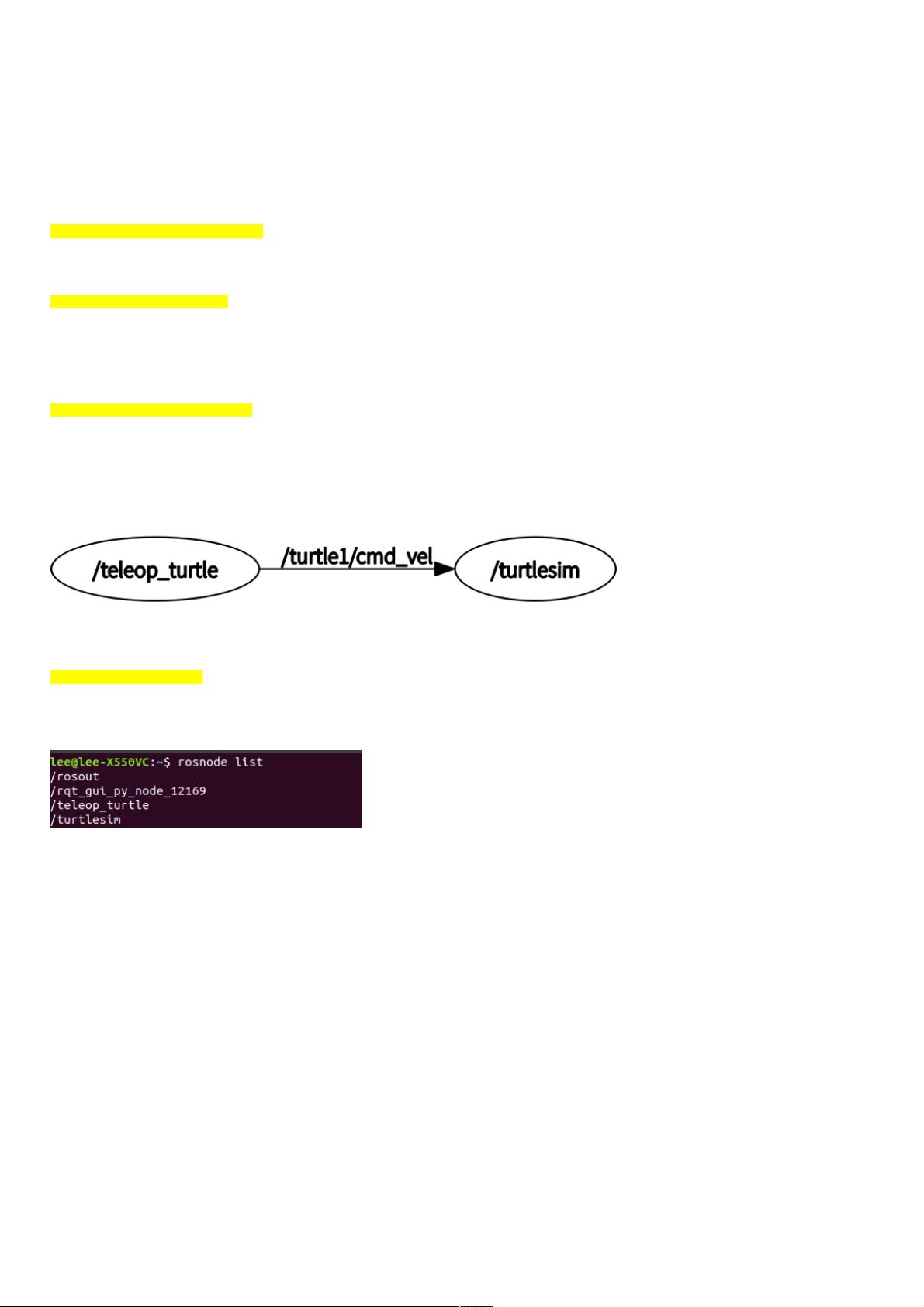
2. **查看rosnode节点关系**:使用`$rqt_graph`工具查看节点之间的依赖关系,可以看到/teleop_turtle节点作为发布者,负责接收用户的键盘输入并将其转换为小海龟的运动指令,而/turtlesim节点作为订阅者,接收并处理这些指令。它们之间的通信管道是/turtle/cmd_vel,意味着发布者在此处发送`geometry_msgs/Twist`类型的消息。
3. **查看发布消息列表**:通过`$rosnodeinfo`命令,可以获取到发布者的具体消息类型,如`/turtle1/cmd_vel`发布的`geometry_msgs/Twist`类型的消息,这是控制小海龟运动的关键。
4. **创建发布者与订阅者**:接下来,文章会指导如何创建自己的发布者和订阅者。发布者负责生成并发布消息,而订阅者则监听这些消息并作出响应。在这里,可能会涉及到自定义的`geometry_msgs/Twist`消息格式的编写。
5. **运行结果展示**:每一步的操作后,都会展示运行结果,包括发布者成功发送消息,以及订阅者接收到并处理这些消息后的动作。
6. **扩展部分**:文章还包括了如何模拟发布简单的`hello_n_word`消息并设置订阅的过程,这可能涉及`std_msgs/String`类型的发布和接收。
通过本文,读者将学习到如何在ROS环境中利用键盘控制小海龟运动,并理解发布者和订阅者的基本工作原理。这对于理解和实践ROS编程,特别是机器人控制和通信至关重要。
ROS 详细讲解通过键盘控制小海龟运动来实现话题发布者详细讲解通过键盘控制小海龟运动来实现话题发布者Publisher与订与订
阅者阅者Sbuscriber
// linear线性的线性的 angular角度的角度的
//%0.2f打印打印geometry_msgs::Twist类型类型
// %s打印打印std_msgs::String类型类型
文章目录文章目录==发布者Publisher与订阅者Sbuscriber====第一步启动小海龟及其键盘控制====第二步查看rosnode节点直接的关系====第三步查看发布
消息的列表====第四步创建发布者Publishser====发布者运行结果:====第五步创建订阅者Sbuscriber====订阅者运行结果:====扩展:发布
hello_n_word并订阅====第一步:模拟发布者====第二步:模拟订阅者====运行结果:==
发布者发布者Publisher与订阅者与订阅者Sbuscriber
// linear线性的线性的 angular角度的角度的
%0.2f打印打印geometry_msgs::Twist类型类型
第一步启动小海龟及其键盘控制第一步启动小海龟及其键盘控制
启动小海龟及其键盘控制启动小海龟及其键盘控制
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
第二步查看第二步查看rosnode节点直接的关系节点直接的关系
查看查看rosnode节点直接的关系节点直接的关系
$ rqt_graph
由于箭头是单向的,所以消息传播是单向的,由图像可知,/teleop_turtle为发布者Publisher,用于键盘发布指令,/turtlesim为订阅者Subscriber,用
于定义指令,两节点的通信管道为/turtle/cmd_vel,只要实现一个发布者在通信管道/turtle/cmd_vel发送相应信息都会被订阅者订阅,下面将介绍如何
查看发布消息的类型
第三步查看发布消息的列表第三步查看发布消息的列表
查看发布消息的列表查看发布消息的列表
$ rosnode list
我们可以看到发布者/teleop_turtle
然后输入下列指令然后输入下列指令
$ rosnode info /teleop_turtle
下载后可阅读完整内容,剩余4页未读,立即下载
2018-10-06 上传
2022-08-11 上传
2022-12-31 上传
2022-08-11 上传
2024-07-08 上传
2021-09-21 上传
2022-12-31 上传

weixin_38588394
- 粉丝: 8
- 资源: 954
 我的内容管理
展开
我的内容管理
展开







最新资源
- aws-realtime-transcription:实时转录演示
- latex_cd:用于 LaTeX 项目的自动编译器和 Dropbox 上传器
- civicactions-homesite:CivicActions网站重新设计
- VUMAT-KineHardening_vumat_ABAQUSvumat
- htl:超文本文字
- blog_app_frontend
- aioCoinGecko:CoinGecko API的Python异步包装器
- Excel模板护士注册健康体检表.zip
- React Native 计算器和计算器输入组件
- HackerNews_Reader:新闻阅读器
- php_imagick-3.4.4rc2-7.2-nts-vc15-x64.zip
- apache-tomcat9
- FreeRTOS_DTU_8M_GPRSDTU_STM32F103_freeRTOSV10.3.1_freertosdtu_Fr
- React更多
- 019.朔州市行政区、公交线路、 物理站点、线路站点、建成区分布卫星地理shp文件(2021.3.28)
- corpoetica-forestry-hylia
