深度图压缩技术:优化3D视频视图渲染
PDF格式 | 589KB |
更新于2024-08-30
| 127 浏览量 | 举报
"这篇研究论文探讨了在3D视频中高效深度图压缩的重要性以及如何实现这一目标的方法。深度图是3D场景信息的一种表示,用于合成虚拟视图,因此其编码效率对3D视频系统至关重要。然而,直接使用现有的视频编码技术压缩深度图会导致渲染的虚拟视图出现不可接受的失真。为了克服这个问题,作者提出了一种基于视图渲染的高效深度图压缩方法。"
正文:
在3D视频中,深度图扮演着关键角色,它包含了场景中各像素点距离相机的距离信息,通过这个信息可以合成出不同的虚拟视图,让观众有更真实的立体视觉体验。然而,由于深度图本身并不直接用于显示,而是用于生成虚拟视图,所以传统的视频编码技术往往无法有效地处理深度图,从而导致合成的虚拟视图质量下降,出现显著的失真。
针对这个问题,该研究论文提出了一个创新的解决方案,即一种基于视图渲染的深度图压缩方法。这种方法旨在最小化渲染过程中产生的失真,确保合成的虚拟视图能够保持高清晰度和逼真的效果。论文作者通过深入研究深度图的特性,结合视图渲染的过程,设计了一套优化的编码策略。
首先,研究可能涉及深度图的特定压缩算法,这些算法可能包括利用深度图的局部一致性、空间冗余以及视差特性来进行更有效的压缩。例如,可以采用预测编码技术,通过相邻像素的深度信息预测当前像素的深度值,减少需要传输的数据量。此外,可能还会利用熵编码进一步压缩已预测的深度值,如算术编码或霍夫曼编码。
其次,论文可能会讨论如何在压缩过程中考虑视图合成的失真度度量。这可能涉及到使用视图合成误差作为质量指标,优化压缩率与失真之间的权衡。通过调整编码参数,使得在保证总体码率控制的同时,尽可能降低对最终渲染视图质量的影响。
最后,论文可能还涉及到了解人眼对3D视频中的失真的感知,以指导压缩策略的制定。人眼对不同类型的失真敏感程度不同,因此,优化压缩方案时需要考虑到这些感知差异,以提供最佳的观看体验。
这篇研究论文的核心在于提出一种能够在3D视频中有效压缩深度图,同时最大化保持渲染视图质量的新方法。通过深入理解和利用深度图的特性,结合视图渲染的原理,该方法有望在3D视频编码领域带来显著的性能提升,为未来的3D视频技术和应用铺平道路。
The primary goal of MVD is the high-quality
reconstruction of arbitrary number of views for
advanced stereoscop ic processing to support auto-
stereoscopic displays. The virtual view quality
depends highly on the quality of depth map. Thus,
efficient depth map coding is crucial in 3D video
coding system. The main object ive of depth map
coding is compression of de pth map to guarantee that
the decoded depth can synthesise high-quality virtual
view. It is important to note that depth map is only
used in view rendering process, but not directly
displayed. Therefore, it is necessary to understand
how the distortion in depth map will affect rendered
view quality. In standard video compression, quanti-
sation errors directly affect the rendered view quality
by adding noise to the luminance or chrominance
level of each pixel. In contrast, the distortion in the
depth map will indirectly affect the rendered video
quality. The dep th map error will lead to geometric
error in the interpolation, which in turn will translate
errors into the luminance or chrominance of the
rendered view.
This section briefly revie ws the general idea of
depth-based view synthesis.
DIBR is the process of synthesising virtual views of
a scene from a reference colour image and associated
per-pixel depth infor mation. First, a pixel (x
r
,y
r
)in
the reference view is warped to the world coordinates
(u,v,w), using the depth of the reference view,
u,v,w½
T
~R
r
A
{1
r
x
r
,y
r
,1½
T
Z
r
x,yðÞzT
r
(1)
where A
r
, R
r
and T
r
respectively represent the
reference camera parameters of the intrinsic matrices,
rotation matrix and translation vector. Z
r
(x,y) is the
depth value associated with (x
r
,y
r
), and subscript r
indicates the reference view. Then, the 3D point is
mapped to the virtual view,
x’,y’,z’½
T
~A
v
R
{1
v
u,v,w
jj
T
{T
v
no
(2)
where the subscript v refers to the virtual view.
By combining equations (1) and (2),
x
0
,y
0
,z
0
½
T
~
A
v
R
{1
v
R
r
A
{1
r
x,y,1½
T
Z
r
x
r
,y
r
ðÞzT
r
{T
v
no
(3)
The corresponding pixel located in the rendered
image of the virtual view is x
v
,y
v
ðÞ~ x’=z’,y’=z’ðÞ.
Equation (2) describes a depth-dependent relation
between the pixel coordinates of corresponding
points in an image pair. According to equation (3),
an arbitrary virtual view can be generated, provided
the depth value Z
r
(x
r
,y
r
) is known for every pixel in the
reference image and the camera parameters are avai-
lable. However, the viewpoint navigation is con-
strained by disocclusion problems of ‘holes’ appearing
in synthesised images if areas occluded in the reference
view become visible in a virtual view. Such artefacts
become obvious when the virtual view is very far away
from its reference.
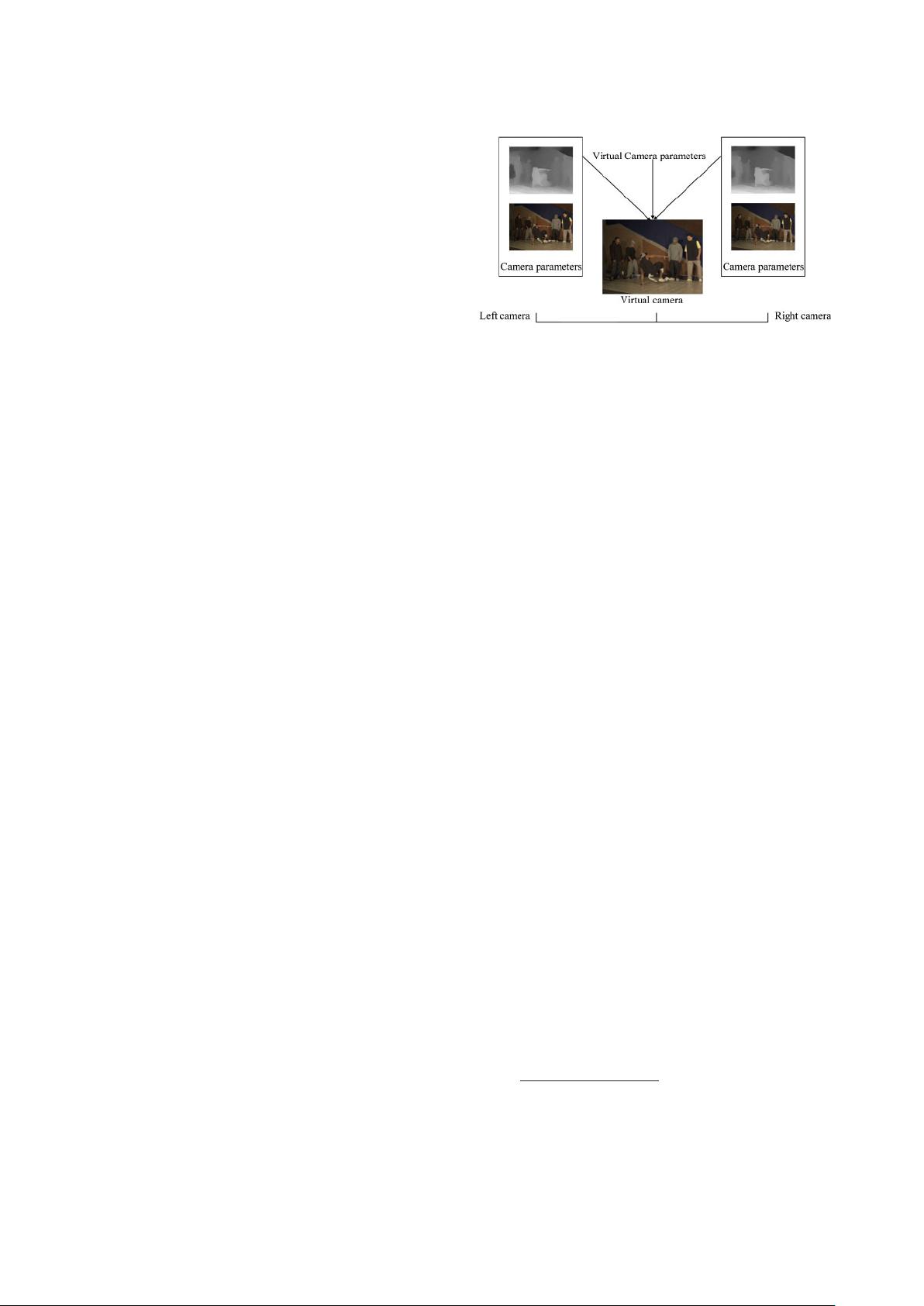
To reduce the impact of disocclusion, MPEG has
recently proposed an ‘MVD’ data format which
enables the generation of a virtual view by making
use of more than one reference view. Figure 2 shows
a classic illustration of the view synthesis based on
such data format. In this paper, the camera placed at
the left of the virtual camera denotes the left camera,
and the other one is called the right camera. In the
example, each pixel in the virtual view is composed by
a weighted sum of its corres ponding points in the two
reference views (the left view and the right view).
Taking into account the occlusion effect, the
virtual view synthesis is rendered by blending two
neighbouring images, as described in equation (4)
I
V
x
V
,y
V
ðÞ~
1{aðÞI
L
x
L
,y
L
ðÞzaI
R
x
R
,y
R
ðÞ,
if x
V
,y
V
ðÞis both visib le in cameras L andR
I
L
x
L
,y
L
ðÞ,
if x
V
,y
V
ðÞis only visible in camera L
I
R
x
R
,y
R
ðÞ,
if x
V
,y
V
ðÞis only visible in camera R
0,
otherwise
8
>
>
>
>
>
>
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
>
>
>
>
>
>
:
a~
T
V
{T
L
jj
T
V
{T
L
jjz T
V
{T
R
jj
(5)
where I
V
(x
V
, y
V
) means the pixel value at virtual
image plane, I
L
(x
L
, y
L
) and I
R
(x
R
, y
R
) respectively
2 View synthesis based on multiview video plus depth
ð4Þ
DEPTH MAP COMPRESSION IN 3D VIDEO 3
IMAG 161
#
RPS 2012 The Imaging Science Journal Vol 0
剩余10页未读,继续阅读
相关推荐



weixin_38718223
- 粉丝: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
