基于Android的多轴飞行器姿态控制系统设计
需积分: 0 18 浏览量
更新于2024-06-21
收藏 5.7MB DOC 举报
"这篇文档是关于毕业论文,主题是基于Android手机的多轴飞行器姿态控制系统,涵盖了从项目背景、技术介绍到系统设计与实现的全过程。论文详细探讨了如何利用Android开发技术,尤其是音频接口,来实现对多轴飞行器的远程控制。"
在当前的科技环境下,Android操作系统因其开源特性和不断发展的技术,已经成为移动设备开发的主流平台。这篇毕业论文深入探讨了如何利用这些特性,特别是在音频接口方面的应用,来构建一个创新的多轴飞行器姿态控制系统。论文首先介绍了项目背景和意义,强调了Android在无人机控制领域的潜力,以及这一技术对航空电子设备和智能硬件的推动作用。
论文结构清晰,从需求分析、可行性分析入手,逐步展开功能分析和业务流程分析。在需求分析部分,作者明确了系统应具备的基本功能,如控制飞行器的俯仰、横滚、偏航和油门等关键姿态。可行性分析则探讨了Android平台与单片机(如ARM开发板)之间的通信可能性,以及音频接口技术在实际应用中的挑战。
在系统设计部分,论文详细描述了如何通过Android平台播放纯音文件,利用音频接口输出正弦波信号。这些信号经过调整幅度和频率后,通过音频线传输至ARM开发板,由开发板将其转化为遥控器所需的模拟信号,进而控制多轴飞行器的运动。论文中还包括了ER图、数据字典和数据流图,这些都为系统的数据库设计提供了详尽的视觉解释。
详细设计环节,作者阐述了Android端应用程序的架构,以及音频接口输出的四路信号如何对应飞行器的四个主要姿态。同时,系统截图展示了用户界面和交互流程,使读者能直观理解系统的运行方式。
尽管系统已实现了音频信号到数字信号的转换,但论文指出,实际在实体多轴飞行器上的测试尚未进行,这为后续的实验验证和优化留出了空间。最后,论文进行了总结,对研究工作进行了回顾,并表达了对指导老师和团队成员的感谢。
关键词涵盖“Android”、“音频”和“单片机”,反映了论文的主要研究方向和技术核心。这篇论文不仅提供了一个创新的控制系统设计,也为未来Android在无人机领域的应用提供了宝贵的理论基础和实践参考。

7
(1)使用真机作为运行、调试环境
使用真机作为运行、调试环境时,只要完成如下 3 步。
① 用 USB 连接线将 Android 手机连接到电脑上。
② 在电脑上为手机安装驱动,不同手机厂商的 Android 手机驱动略有差异,请登
录各手机厂商官网下载手机驱动。
③ 打开手机的调试模式。打开手机,依次单击“所有应用→设置→开发者选项”,
进入图 2-4 所示的设置界面。
按图 2-4 所示,勾选“USB 调试”、“允许模拟位置”3 个选项即可。若开发者还
有其他需要,也可以勾选其他的开发者选项。
图 2-4 打开调试模式
(2)使用 AVD 作为运行、调试环境
Android SDK 为开发者提供了可以在电脑上运行的“虚拟手机”,Android 把它称为
Android Virtual Device (AVD)。如果开发者没有 Android 手机,则完全可以在 AVD 上
运行 Android 应用。
创建、删除和浏览 AVD 之前,通常应先为 Android SDK 设置一个环境变量:
ANDROID_SDK_HOME,该环境变量的值为磁盘上一个已有的路径。若不设置环境变
量 , 开 发 者 创 建 的 虚 拟 设 备 默 认 保 存 在 C : \Documents and
Settings\<user_name>\.Android 目录下;如果设置了 ANDROID_SDK_HOME 环境变量,
那么虚拟设备就会保存在
% ANDROID_SDK_HOME%/.android 路径下。
在图形界面下管理 AVD 比较简单,因为可以借助于 Android SDK 和 AVD 管理器
完成,完全可以在图形用户界面下操作。
① 通过 Android SDK 安装目录下 AVD Manager.exe 启动 AVD 管理器,系统启动
如图 2.3 所示的 AVD 管理器。单击该管理器左边的“Virtual devices”项,管理器列出
当前已有的 AVD 设备。
② 单击图 2-5 所示窗口右边的“New…”按钮,AVD 管理器弹出如图 2-6 所示对
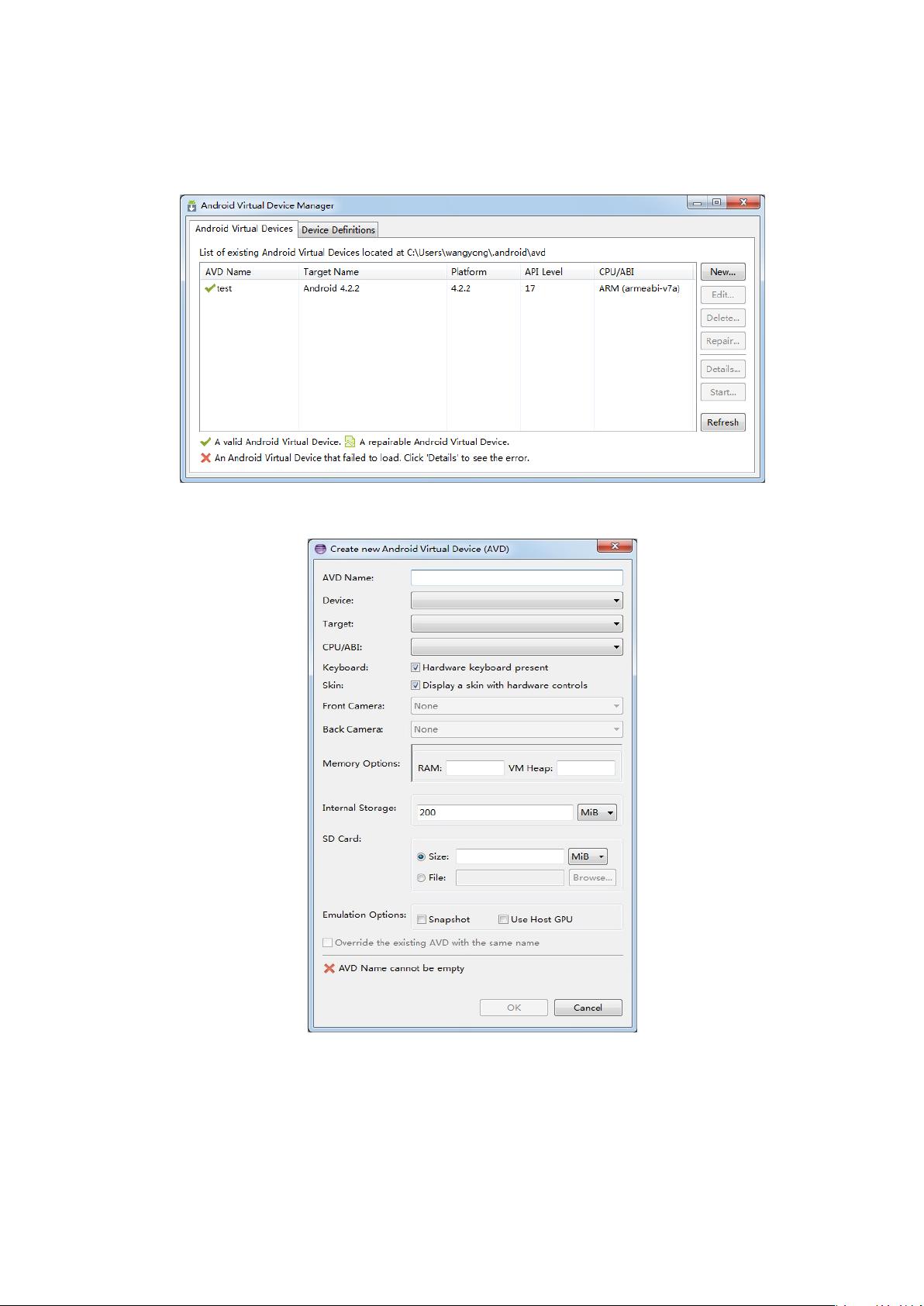
剩余64页未读,继续阅读
2023-08-23 上传
2023-08-23 上传
2023-08-23 上传
2023-08-23 上传
2023-08-23 上传

Q_97095639
- 粉丝: 386
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
