ITMO大学人工智能讲座:机器学习与MATLAB在机器人建模中的应用
需积分: 5 112 浏览量
更新于2024-07-01
收藏 6.5MB PDF 举报
ITMO大学的人工智能PPT涵盖了机器学习与MATLAB教学的重要内容,主要针对的是机器人模拟能力的提升和理论基础。讲座由Ivan Borisov主讲,他拥有工程学士和机器人学硕士学历,分别于2014年和2016年在ITMO University获得,随后在2019年完成了关于机器人与机电一体化的博士论文。他的专业背景包括在工业界的工程实践经验,以及自2017年起在该校控制系统与机器人学学院担任助理教授的角色,同时在生物机电一体化与能源高效机器人国际研究实验室担任研究员。
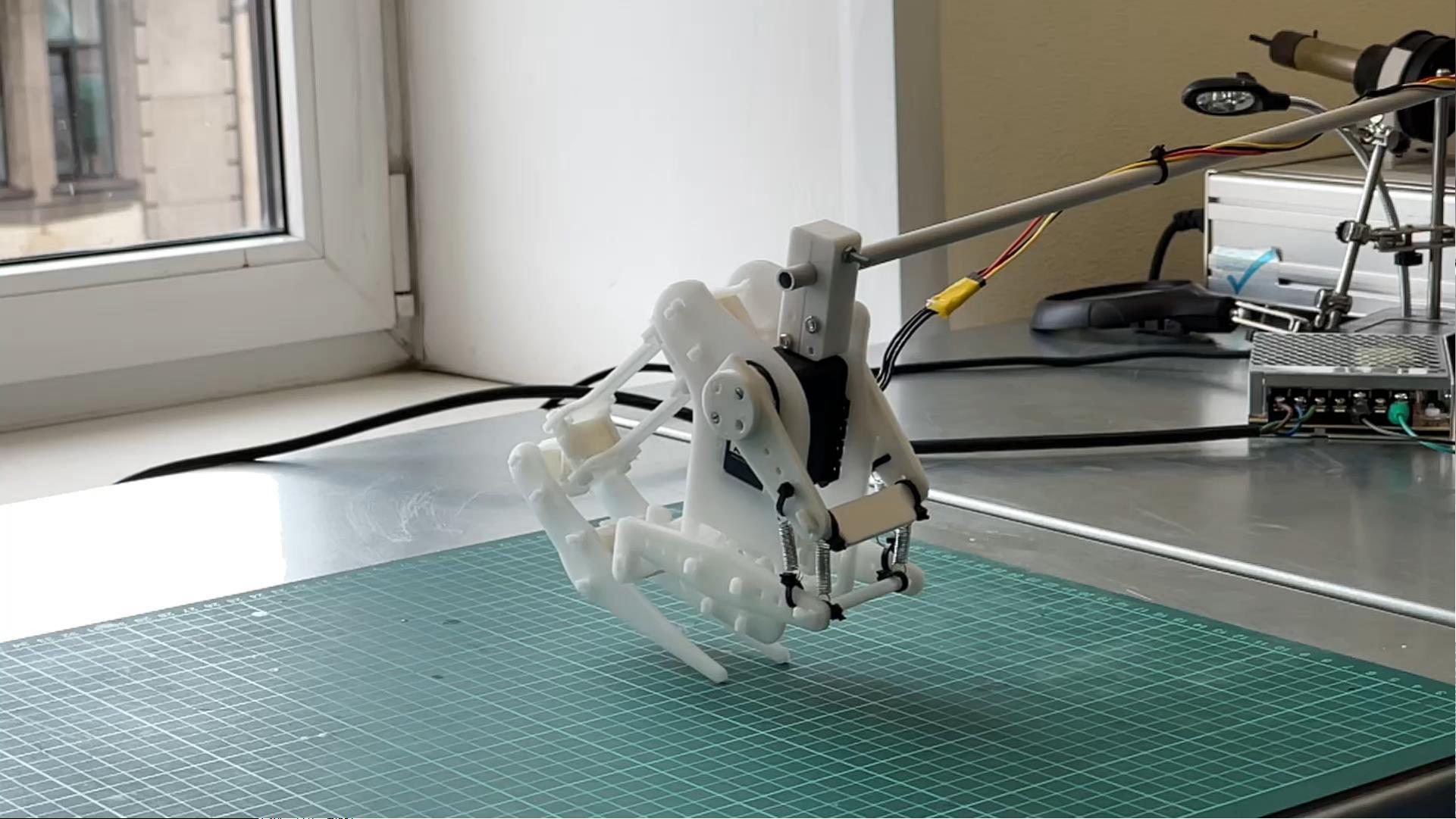
讲座的核心议题包括机器人建模(RobotsModelling)和模拟(ModellingvsSimulation),探讨了为什么理解和掌握这些技术是必要的。课程安排在每周的固定时间,包括三个连续的时段,旨在通过理论与实践相结合的方式,引导学生理解机器学习如何应用于机器人设计,尤其是如何利用计算设计实现可重构的、适应性强的机械结构,如采用生物启发的适应性夹爪设计。
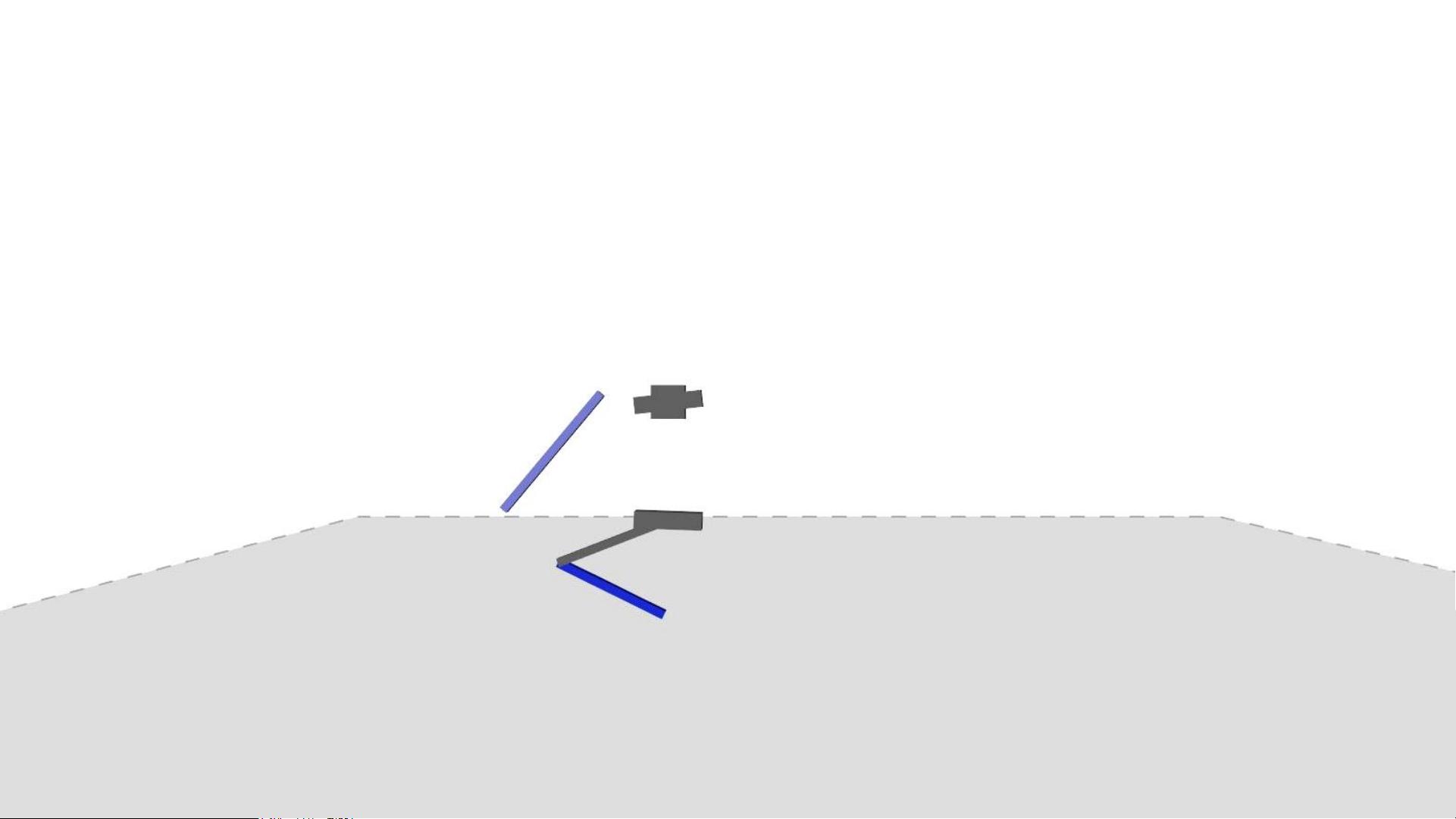
参考文献中提到的一项工作《Computational design of reconfigurable underactuated linkages for adaptive grippers》是在2021年的IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)上发表的,展示了研究人员如何利用计算方法设计出能够模仿生物形态变化的机械装置,从而赋予机器人更强的抓握能力。这一部分着重讲解了形态计算在机器人设计中的重要性,许多理想的行为特征实际上已经内置于这种基于生物学原理的机械设计之中。
整个课程不仅提供了坚实的理论基础,还通过MATLAB教学,让学生能够亲手实践和应用所学知识,将理论与实际操作结合起来,培养他们在人工智能领域特别是机器学习方向的专业技能。这是一门既注重理论深度又强调动手能力培养的课程,对于想要在这个快速发展的领域取得突破的学生来说,无疑是一次宝贵的学习机会。
点击了解资源详情
2022-09-22 上传
2022-09-24 上传
2023-06-01 上传

xb12333
- 粉丝: 12
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
