单闭环直流电机调速系统Simulink仿真与分析
版权申诉
"这篇文档主要介绍了单闭环直流电机调速的Simulink仿真过程,包括电机调速的基本原理、闭环系统的结构、系统建模以及仿真设置。文档详细阐述了调速方法,选择了改变电枢电压的V-M调速系统,并探讨了无静差转速负反馈调速系统的构成和参数设置。"
在直流电机调速系统中,通常采用三种方法来调整电机速度:改变电枢供电电压、减弱励磁磁通和改变电枢回路电阻。文档中重点关注了改变电枢电压的方法,这是通过V-M系统实现的,该系统由晶闸管整流装置供给直流电动机电力。闭环系统包括电压比较环节、放大器、晶闸管整流器、速度检测环节等,其中速度反馈系数对系统的稳定性和性能有着关键影响。
对于单闭环无静差转速负反馈调速系统,电气原理图展示了系统的主要组成部分,包括给定、速度调节器、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机等。三相交流电源提供输入,同步脉冲触发器确保六脉冲触发器的正确工作,而晶闸管整流桥则将交流电压转换为直流电压供电机使用。PID模块作为速度控制器,通过调整其参数来实现无静差运行。限幅器模块用于限制速度调节器输出,确保同步脉冲触发器的工作稳定性。
在仿真阶段,选择了ode23s算法,设置初始时间为0,结束时间为3。仿真参数如给定信号、电机参数和平波电抗器参数等都进行了详细设定。通过这样的仿真,可以观察到系统在不同条件下的动态响应,验证调速系统的性能和稳定性。
总结来说,这份文档深入讲解了单闭环直流电机调速系统的Simulink仿真步骤,涵盖了从基本理论到具体实现的全过程,为理解和设计此类调速系统提供了详细指导。
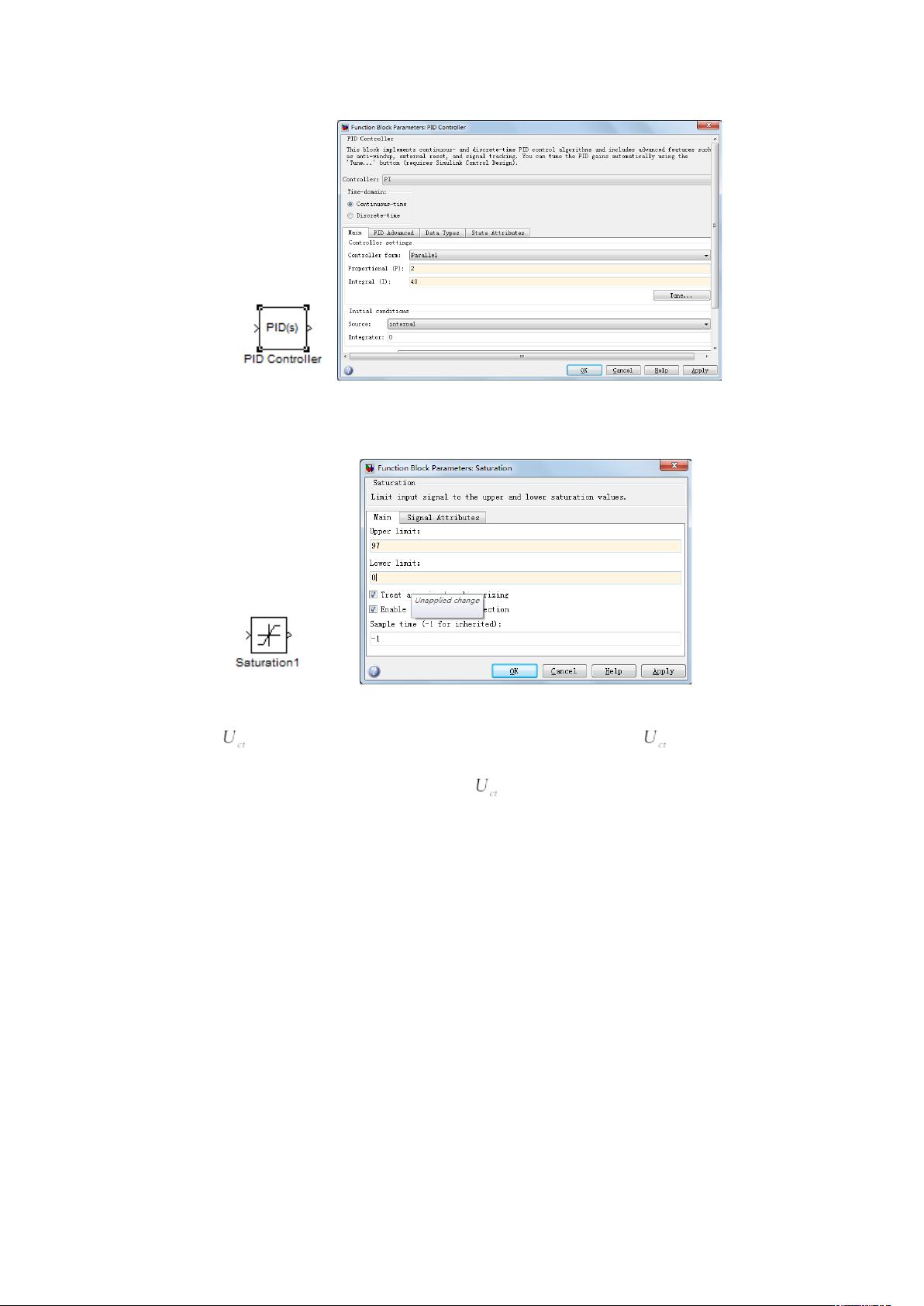
PID 模块及其参数设置
PI 的控制器可以通过现有的 PID 模块进行设置。
限幅器模块及其参数设置
通过对 参数变化范围的探索而知:在单闭环无静差系统中,当 在 110~207 范围
内变化时,同步脉冲触发器能够正常工作;当 为 110 时,对应的整流桥输出电压最大;
而;而 207 对应的输出电压最小。为此,我们将限幅器的上、下限幅值设置为[97,0],用加
法器加上偏置“-207”后调整为[-110,-207],再经反相器转换为[110,207]。这样通过限幅器、偏
置、反向器等模块的应用,就可将速度调节器的输出限制在使用同步脉冲触发器能够正常
工作的范围之内了。
剩余17页未读,继续阅读
480 浏览量
点击了解资源详情
1066 浏览量
103 浏览量
116 浏览量
113 浏览量
1048 浏览量
2022-06-25 上传
2024-11-11 上传

猫一样的女子245
- 粉丝: 231
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- HackUconn2021
- Extension Serial Gramera-crx插件
- 图像变换之小波变换.rar
- 现场监测员:Projeto desenvolvido durante o curso de Go da alura
- java笔试题算法-ARACNe-AP:通过互信息的AP推理进行网络逆向工程
- enas_model:使用ENAS自动构建深度学习模型
- Goldmine-crx插件
- 食品、百货部员工标准化服务及考核细则
- 荣誉
- 易语言源码易语言使用汇编调用子程序.rar
- laravel-wordful:只是Laravel的一个简单博客包
- Traffic-Signs-and-Object-Detection:这是我们的SIH 2018项目,可检测与交通相关的物体,例如交通标志,车辆等
- 初级java笔试题-cs-material:cs-材料
- Blogr-Landing-Page:前端导师的挑战
- 西点面包店长工作手册
- obs-studio.rar
