




基于Matlab的PUMA560工业机器人运动学与雅可比矩阵研究
版权申诉
200 浏览量
更新于2024-06-25
1
收藏 664KB DOCX 举报
工业机器人课程设计文档主要探讨了基于Matlab的工业机器人的运动学分析与雅各比矩阵求解方法。随着科技的迅速进步,机器人学作为一个交叉学科,吸引了众多来自不同专业背景的研究者投入研究,以提升机械产品的自动化水平、精度和承载能力。PUMA560,作为一种常见的关节式机器人,拥有六个独立的转动关节,其设计结构如图1-1所示,其运动控制和精确计算对于现代工业生产至关重要。
在本文中,作者将重点聚焦于PUMA560机器人的正解(forward kinematics)和逆解(inverse kinematics)问题。正解是指给定末端执行器的位置,求解关节角度,而逆解则是相反的过程,即给定关节角度,确定末端执行器的位置。这两个问题在机器人路径规划、控制和仿真中起着核心作用。
雅可比矩阵(Jacobian matrix)是连接机器人关节速度与末端执行器速度的关键数学工具,它反映了关节空间与任务空间之间的变换关系。利用Matlab的强大计算能力,可以高效地实现这些数学运算,包括微分变换法和矢量积法等高级数学处理技巧,以提高精度并简化复杂计算过程。
通过PUMA560的实例,本文展示了如何运用Matlab进行运动学建模,从而解决实际中的运动控制问题。这对于理解和掌握工业机器人的设计原理、编程控制以及优化算法具有重要的参考价值。此外,关键词"正解"、"逆解"、"雅可比矩阵"、"微分变换法"和"矢量积法"揭示了文章的核心研究内容和技术手段。
本课程设计文档不仅提供了理论基础,还提供了一种实践方法,有助于学生深入理解工业机器人技术,并在未来的研发和应用中发挥重要作用。通过学习和掌握这些概念和技术,参与者可以提升自己在机器人领域的能力,适应快速发展的工业4.0时代的需求。
PUMA560 机器人简介
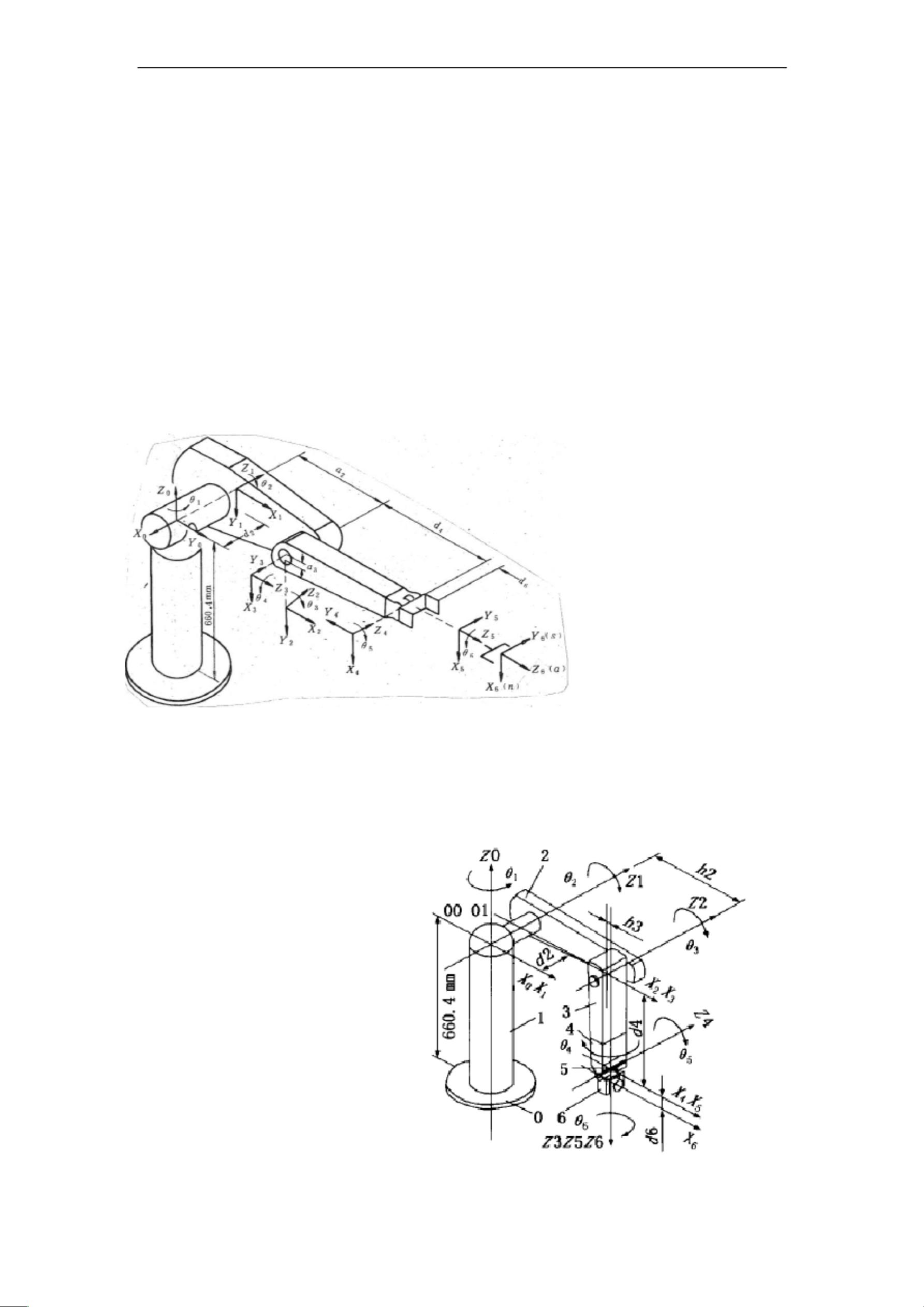
PUMA560 是属于关节式机器人,6 个关节都是转动关节,如图 1—1 所
示,前三个关节确定手腕参考点的位置,后三个关节确定手腕的方位。和大多
数工业机器人一样,后三个关节轴线交于一点。该点选作为手腕参考点,也选
作为{4}、{5}、{6}的原点。关节一的轴线为垂直方向,关节 2 和关节 3 的轴线
为水平,且平行,距离
为 。关节 1 和关节 2
a
2
的轴线垂直相交,关节 3
a
错。距离为 。各个连
3
示,相应的连杆参数列
a
a
d
于表 1—2 中。其中,
431.8 , 20.32mm, 149.09mm,
mm
2
3
2
d
433.07mm。
3
PUMA560 机器人的转
动角度问题时,我们先
来定义一下 PUMA560
机器人的初始位姿。首
先,定义机器人的初始位
置.取大臂处于某一朝向
下载后可阅读完整内容,剩余21页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-11-26 上传
138 浏览量
2021-10-11 上传
2022-11-04 上传
2021-09-22 上传
2023-07-12 上传

想要offer
- 粉丝: 4092
 我的内容管理
展开
我的内容管理
展开








最新资源
- VB自定义菜单皮肤控件:设置菜单颜色新体验
- 自主实现基于QT的贪吃蛇游戏
- 深入探讨VC++中自定义CButton类的实现
- Java List集合使用与实例深入解析
- Android开发中ListView的使用技巧
- 解决闰年问题的Python编程测试与实现过程
- 深入解析ExtJS MVC官方实例教程
- 掌握dom4j解析技术,提升XML数据处理能力
- MiniSTM32原理图及封装库教程与例程
- RenameIt: 强大批量文件重命名工具体验
- SSD8完整版答案及练习文件揭秘
- Android自定义View实现动态心率图表绘制
- BYYZZ002 特殊行业损益结转操作指南
- 深入探讨DSP技术的应用与发展趋势
- CTreeCtrl控件应用实例详解
- Java Selenium WebDriver自动化测试实战






















