欧姆龙PLC驱动的多级皮带机自动化控制系统设计与组态监控
7 浏览量
更新于2024-06-23
收藏 1.05MB DOC 举报
本篇论文是关于理工学院本科毕业生设计项目,主要针对电气工程及其自动化专业的研究课题——"基于组态软件的多级皮带机PLC控制系统设计"。该研究旨在解决多级皮带机运输系统的实时监控和自动化控制问题,具体以四级皮带机为例进行设计。
在论文中,作者首先对控制需求进行了深入分析,确定了以PLC作为核心控制器,其硬件电路设计考虑了系统的可靠性和稳定性。欧姆龙PLC的选择体现了作者对主流工业控制技术的掌握,它在编程过程中扮演了关键角色,确保了控制系统的精准执行。在实验箱上,通过实际操作和调试,验证了PLC程序的有效性。
接下来,论文着重介绍了上位机组态软件的应用。组态软件在这个设计中起到了至关重要的作用,它允许用户根据控制对象的实际特性和需求,构建定制化的监控界面。这种软件与下位机PLC的集成,实现了上位机对下位机的实时监控和管理,使得整个系统能够动态调整并提供直观的数据反馈,极大地提高了皮带机运行的效率和安全性。
设计中包含了两个表格和十六幅插图,这些图表可能展示了系统的结构、参数设置、控制流程图以及监控界面的效果,使读者能够更好地理解设计思路和实施步骤。此外,论文还明确了作者的身份信息,包括学号、指导教师和评阅人员,以及完成日期等,表明了学术诚信的重要性和研究的严谨性。
关键词"欧姆龙PLC"、"皮带机"和"组态软件"突出了论文的核心技术,而"监控系统"则强调了设计的目标——实时监控与智能管理。总体而言,这篇论文将理论知识与实际应用相结合,展现了一个理工科学生在PLC控制领域的能力和创新思维。通过阅读此论文,读者可以了解到多级皮带机控制系统的详细设计过程,以及组态软件在其中起到的关键作用。
基于组态软件的多级皮带机 PLC 控制系统设计
3
非常广泛的 PLC 之一。
OMRON C 系列 PLC 产品门类齐、型号多、功能强、适应面广。大致可以分成微型、
小型、中型和大型四大类产品。整体式结构的微型 PLC 机以 C20P 为代表的机型。叠装
式结构的微型机以 CJ 型机最为典型。OMRON 中型机以 C200H 系列最为典型。小型 PLC
机以 P 型机和 CPM 型机最为典型,体积更小、指令更丰富、性能更优越,通过 I/O 扩展
可实现 10-140 点输入输出点数的灵活配置,并可连接可编程终端直接从屏幕上进行编
程,CPM 型机是 OMRON 产品用户目前选用最多的小型机。在一般的工业控制系统中,小
型 PLC 机要比大、中型机的应用更广泛。在电气设备的控制应用方面,一般采用小型 PLC
机都能够满足需求。本设计我们采用 OMRON 公司 CPM1A 系列小型机作为主要设备。
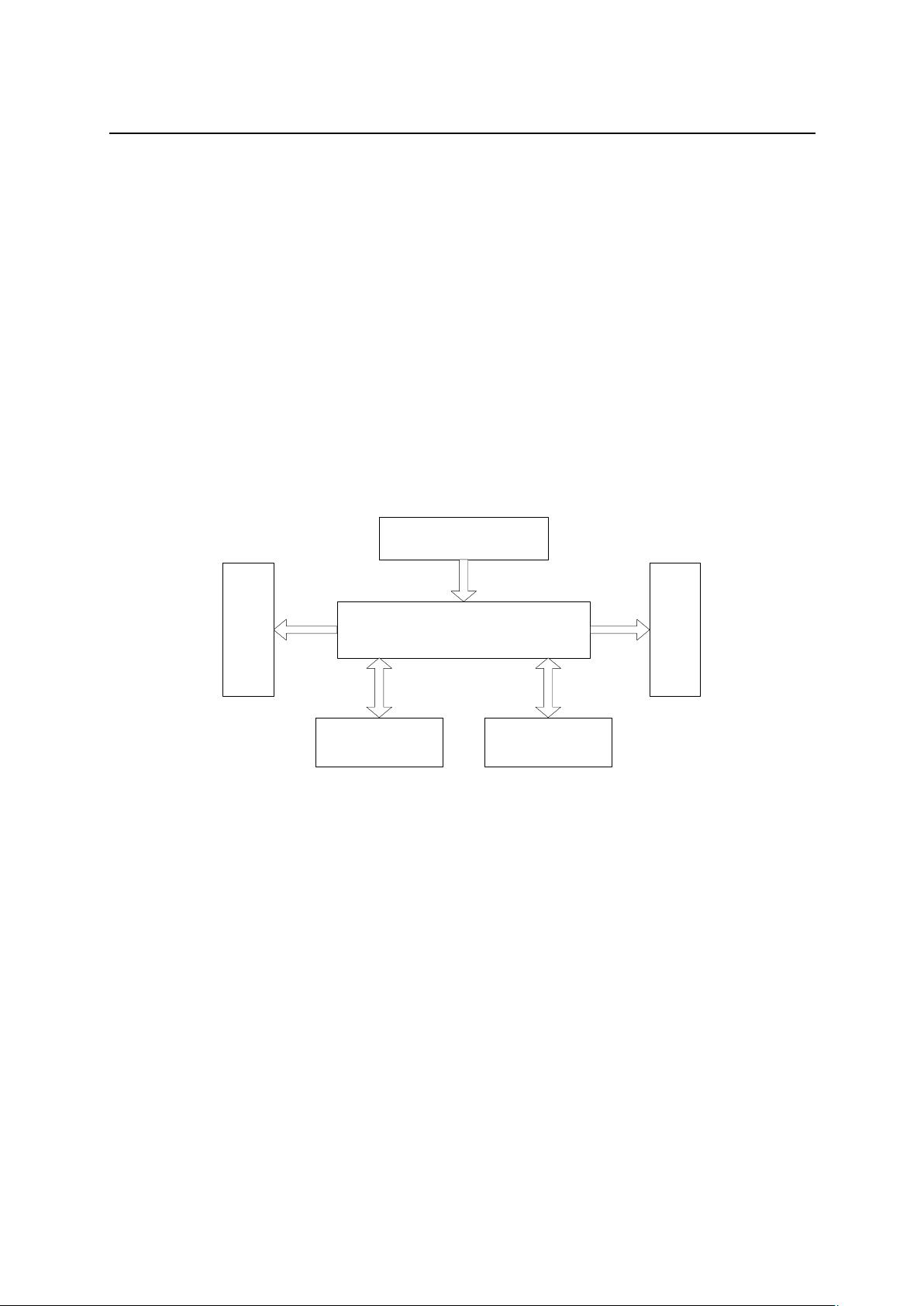
与所有小型机一样,CPM1A 系列 PLC 采用整体式结构, 内部由基本单元、电源、系
统程序区、用户程序区、输入/输出接口、I/O 扩展单元、编程器接口及其它外部设备
组成。PLC 基本组成结构图如图 1 所示。
中央处理单元(CPU)
显示区
系统程序存储
区
用户程序存储
区
输
入
电
路
输
出
电
路
图 1 PLC 的基本组成结构图
可编程序逻辑控制器(Programmable Logic Controller)通常称为可编程控制器,
英文缩写为 PLC 或 PC,是以微处理器为基础,综合计算机技术、自动控制技术和通信
技术而发展起来的一种通用的工业自动控制装置。它将传统的继电器控制技术和现代计
算机信息处理技术的优点结合起来,成为工业自动化领域中最重要、应用最多的控制设
备。目前已广泛用于冶金、能源、化工、交通、电力等行业,并已跃居现代工业控制三
大支柱(PLC、机器人和 CAD/CAM)的首位。
(2)PLC 工作原理
各种 PLC 都采用扫描工作方式,具体工作过程大同小异。第一部分是上电处理。机
器通电后,对 PLC 系统进行一次初始化工作,包括硬件初始化,1/0 模块配置检查和其
它初始化处理等。第二部分是扫描过程,分为三个阶段:
输入采样阶段:在 PLC 的存储器中,设置了一片区域来存放输入信号和输出信号的
状态,它们分别称为输入映像寄存器和输出映像寄存器。在输入采样阶段,PLC 把所有
剩余34页未读,继续阅读
2023-07-08 上传
2023-07-08 上传
2023-06-28 上传
2023-07-08 上传
2023-06-30 上传

yyyyyyhhh222
- 粉丝: 448
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
