使用Matlab Simulink Instrument Control Toolbox与Arduino UNO串口通信教程
需积分: 10 98 浏览量
更新于2024-09-04
收藏 825KB PDF 举报
"该资源是一本关于利用Matlab Simulink中的Instrument Control Toolbox与Arduino UNO进行串口数据采集的书籍。书中详细介绍了如何通过SerialReceive模块从Arduino发送的数据,并在Simulink环境中进行处理和分析。"
在MATLAB Simulink中,Instrument Control Toolbox是一个强大的工具箱,它允许用户与各种仪器设备进行交互,包括那些通过串口通信的设备,如Arduino UNO。本资料主要聚焦于如何使用这个工具箱进行串口数据的接收,而不涉及发送数据。
首先,Arduino UNO发送数据时,通常会用到`Serial.println()`函数。例如,`Serial.println(1235)`将发送ASCII编码的1235,其格式为49481310,其中49对应1,48对应0,13代表回车(CR),10代表换行(LF)。
在Simulink中,使用Serial Receive模块来接收这些数据。设置Terminator为CR/LF以正确解析Arduino发送的数据。Datasize参数需要根据实际数据长度调整,比如设置为[101],以显示10行1列的数据。通过观察运行结果,我们可以识别出ASCII码与实际数字的对应关系,例如49表示1,50表示2,以此类推。
在实际数据接收过程中,Serial Receive的Datasize应设置为数据的实际位数,例如对于1235,设置为[41]。接下来,使用demux模块将数据拆分成单独的位,然后通过适当的方法将这些位转换回对应的十进制数值。这里的关键是构建一个以48(即ASCII码中的'0')为基准的相对量,从而将接收到的ASCII码转化为十进制数。
在另一部分(PART2)中,提到了Simulink Query Instrument模块,它可以用于定时查询仪器状态或数据。在设置时,Block Sample Time需要设定为一个正数值,同时清除Query Command字段的内容,并启用"Remove any additional bytes from input buffer"选项,以确保只处理目标数据,而忽略其他可能的附加信息。
通过以上步骤,用户可以成功地在MATLAB Simulink环境中实现与Arduino UNO的串口通信,进行数据采集和处理。这对于控制系统的设计和测试,以及实验数据的实时分析都极其有用。此书籍的内容对相关专业的学生和工程师来说是一份宝贵的参考资料,可以帮助他们掌握如何有效地利用MATLAB工具箱进行硬件接口开发。
基于 Matlab Simulink 中的 Instrument control toolbox 的串口数据采集
Matlab Simulink 中的 Instrument control toolbox 可以方便与任何具有串口的设备进行连
接和通信,本文主要讲述使用 Arduino UNO 的串口与其进行通信,且只设置从串口采集数据,
不涉及发送数据。
PART1 Serial Receive 的使用
1.1Arduino uno 串口发送数据:
使用函数:Serial.println( )
例如:
Serial.println(10)
发送数据的 ASCII 格式为:49481310,其中 49 代表 1;48 代表 0;13 代表 CR 即回车;10
代表 LF,即换行。
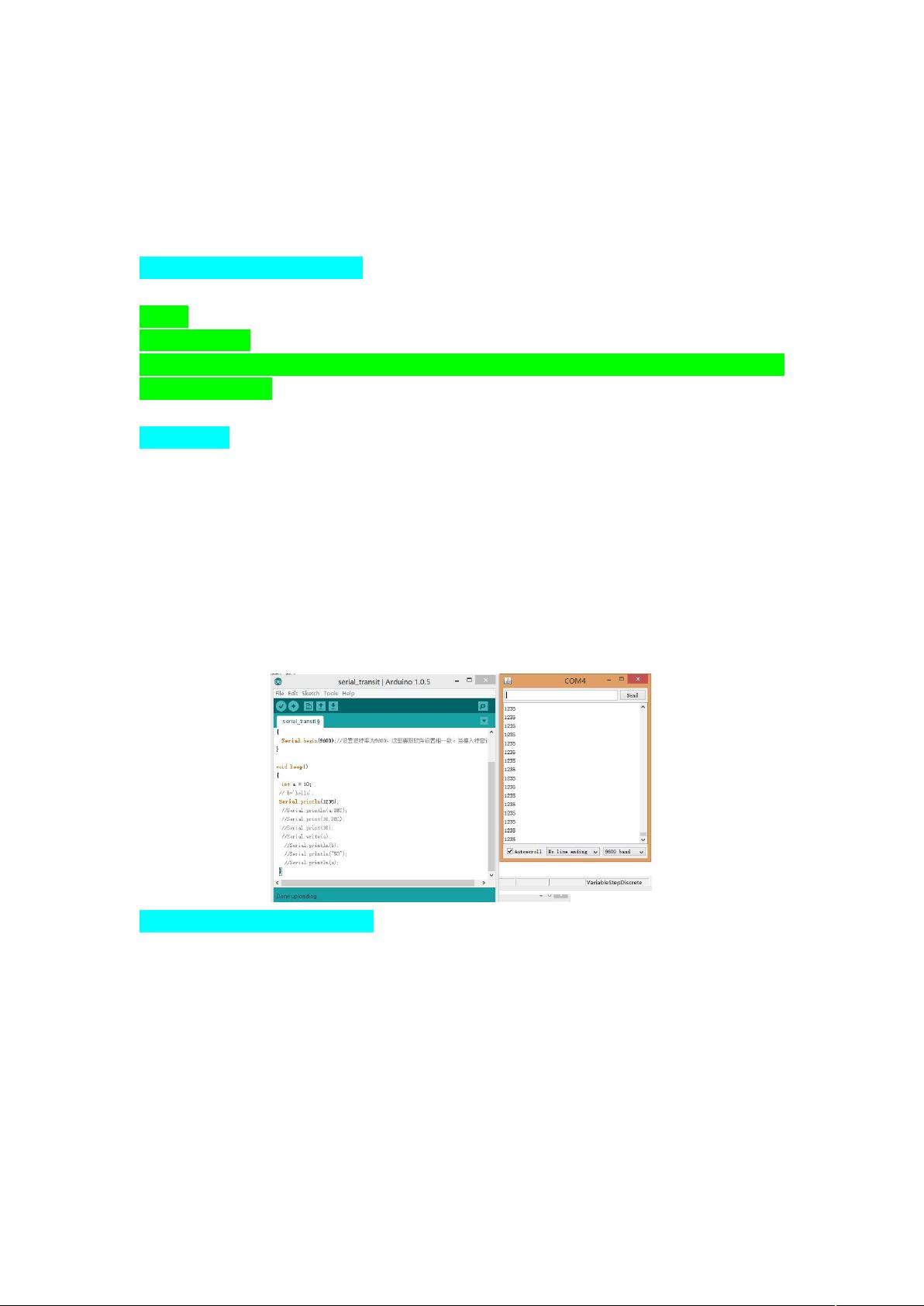
1.2 源程序:
void setup()
{
Serial.begin(9600);//设置波特率为 9600。
}
void loop()
{
Serial.println(1235);
}
1.3 Simulink 串口接收格式验证:
下载后可阅读完整内容,剩余7页未读,立即下载
574 浏览量
1098 浏览量
155 浏览量

log1000_li
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java源码实战经典:随书源码解析
- Java PDF生成器iText开源jar包集合
- Booth乘法器测试平台设计与实现
- 极简中国风PPT模板:水墨墨点创意设计
- 掌握openssh-5.9:远程Linux控制的核心工具
- Django 1.8.4:2015年最新版本的特性解析
- C# WinFrom图片放大镜控件的实现及使用方法
- 易语言模块V1.4:追梦_论坛官方增强版
- Yelp评论情绪分析方法与实践
- 年终工作总结水墨中国风PPT模板精粹
- 深入探讨雷达声呐信号处理与最优阵列技术
- JQuery实现多种网页特效指南
- C#实现扑克牌类及其洗牌功能的封装与调用
- Win7系统摄像头显示补丁快速指南
- jQuery+Bootstrap分页插件的四种创意效果展示
- 掌握karma-babel-preprocessor:实现ES6即时编译
