CAN总线通信协议详解:标准与扩展格式
需积分: 9 197 浏览量
更新于2024-07-28
1
收藏 374KB PDF 举报
"CAN通信协议是汽车电子设备和工业自动化领域广泛应用的一种串行通信协议,由 Bosch 公司在1980年代初开发,旨在满足汽车内部各电子控制单元(ECU)之间的高效、可靠通信需求。CAN总线通信协议有两个主要版本:CAN 1.2和CAN 2.0,后者引入了扩展格式,提供了更广泛的标识符范围,以适应更复杂的应用场景。
在CAN 2.0规范中,报文格式分为标准格式和扩展格式。标准格式的标识符(ID)由11位组成,适用于简单的系统,而扩展格式的ID则扩展到了29位,允许更多的节点和更复杂的优先级管理。这两种格式的区分在于报文的首个保留位,当该位为0时,表示标准格式,为1时,表示扩展格式。CAN 2.0规范的A部分详细描述了与CAN 1.2兼容的标准格式,B部分则涵盖了标准格式和扩展格式的说明。
CAN通信协议的核心特性包括:
1. **多主站仲裁**:CAN总线允许多个节点同时发送数据,通过比较ID的优先级来决定哪个节点能成功发送,高优先级的节点优先传输数据。
2. **错误检测与恢复机制**:CAN协议包含强大的错误检测和错误处理机制,如错误帧和过载帧的发送,用于识别和纠正通信错误。
3. **报文校验**:每个数据帧包含一个循环冗余校验(CRC)字段,用于检查数据传输的准确性。
4. **位定时要求**:CAN协议规定了严格的位定时要求,确保不同速度的节点能在总线上同步通信。
5. **故障界定**:当节点检测到连续的错误,它会进入故障被动状态,然后可能进入故障分离状态,停止发送数据,减少对总线的影响。
6. **位编码**:CAN协议使用曼彻斯特编码,保证信号的边沿变化,增强了信号的抗干扰能力。
在实际应用中,CAN总线广泛应用于汽车电子(如发动机控制、刹车系统、安全气囊等)、医疗设备、楼宇自动化和工业自动化系统。由于其高可靠性、低电磁辐射和低成本,CAN总线成为许多嵌入式系统中的首选通信协议。
在设计CAN系统时,选择合适的CAN控制器和收发器是关键,同时需要考虑总线长度、节点数量以及电气环境等因素,以确保系统的稳定运行。对于扩展格式,系统设计者可以根据需要决定是否使用更宽的ID范围,以适应特定的应用需求。
CAN通信协议通过其高效、可靠的特性,已经成为现代电子系统中不可或缺的一部分。无论是简单的汽车组件通信,还是复杂的工业自动化网络,CAN总线都展现出了其强大和灵活的一面。"
广州周立功单片机发展有限公司 Tel: 020-38730976 38730977 Fax:38730925 http://www.zlgmcu.com
- 7 -
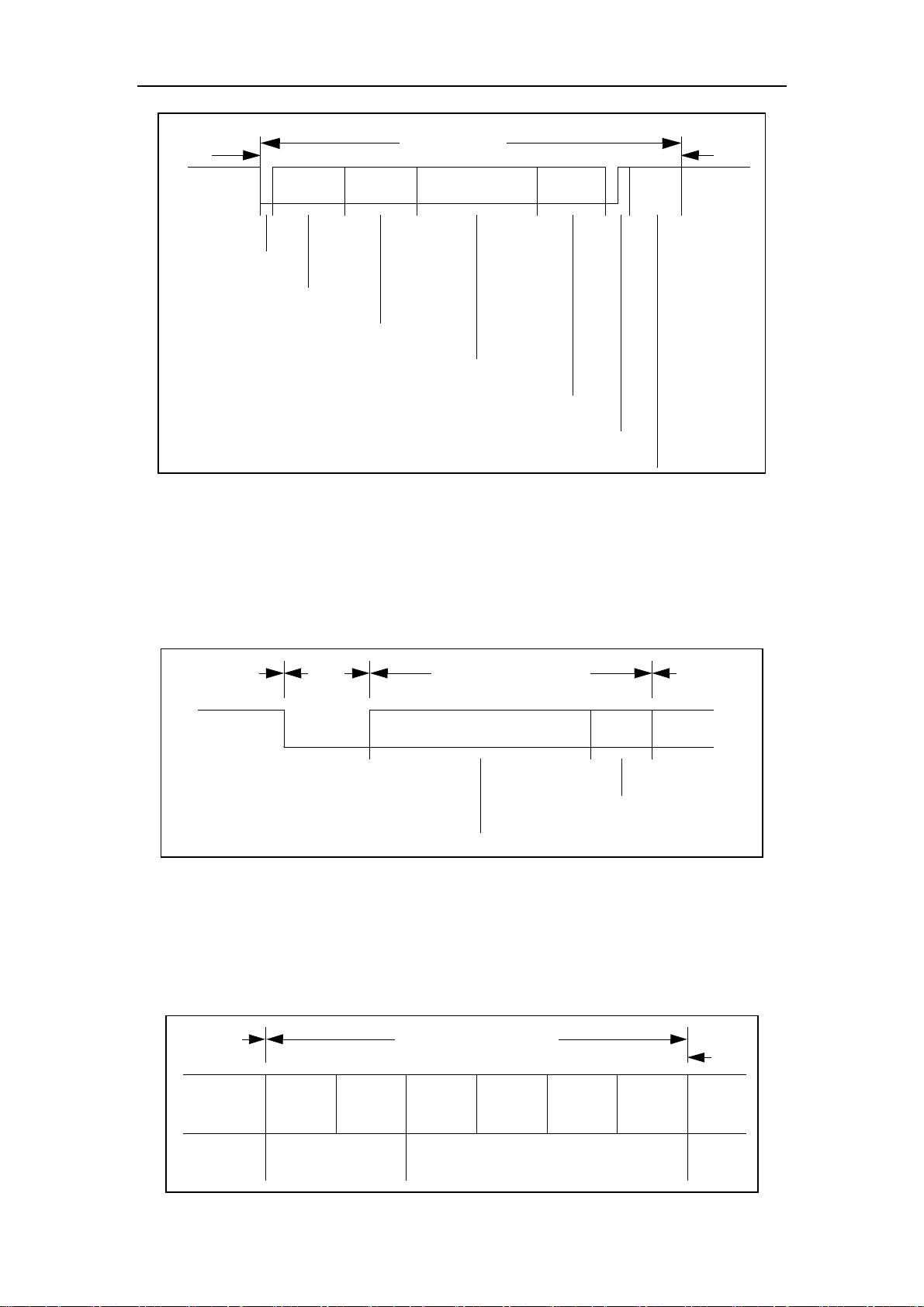
Interframe
Space
Interframe
Space
Start of Frame
Arbitrat ion Field
Cont rol Field
Data Field
CRC F i el d
AC K F ield
End of Frame
or
Overload
Fr a me
DATA F RAME
仲裁场
仲裁场包括识别符和远程发送请求位(RTR)。
识别符:识别符的长度为 11 位。这些位的发送顺序是从 ID-10 到 ID-0。最低位是 ID-0。最高的 7 位
(ID-10 到 ID-4)必须不能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
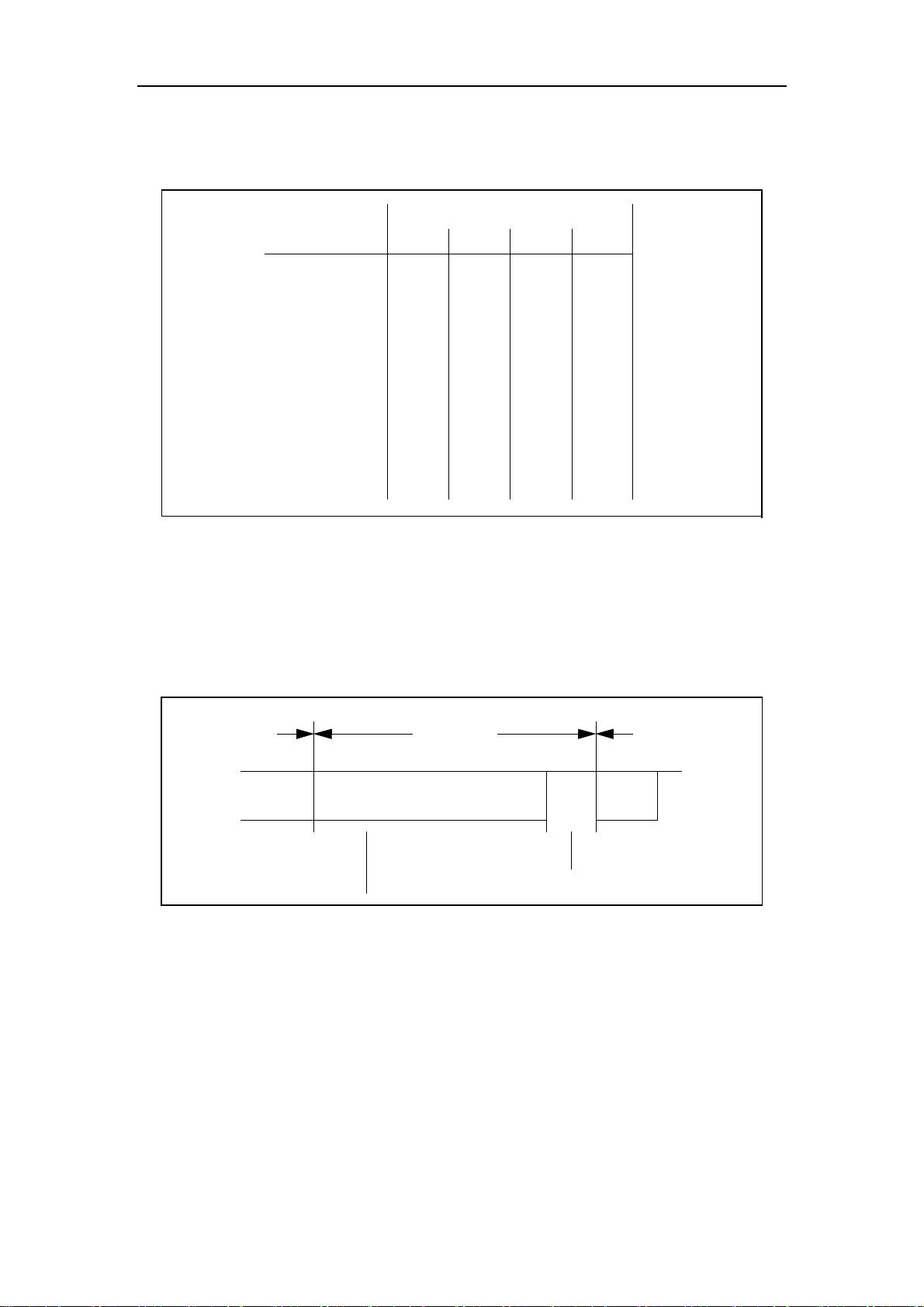
Interframe
Space
St a r t
of Frame
Identifier
RT R B i t
Co n t r o l
Fi e ld
AR BI TRATION F IELD
控制场
控制场由 6 个位组成,包括数据长度代码和两个将来作为扩展用的保留位。所发送的保留位必须为“显
性”。接收器接收所有由“显性”和“隐性”组合在一起的位。
数据长度代码:数据长度代码指示了数据场中字节数量。数据长度代码为 4 个位,在控制场里被发送。
r1 r0 DLC3 DLC2 DLC1 DLC 0
or
CRC
Fi e l d
Ar bit ration
Fi e l d
Dat a
Fi e l d
CO N T RO L F IE L D
Dat a Lengt h Codereserved
bits
剩余35页未读,继续阅读
2014-04-11 上传
2023-06-21 上传
2023-05-26 上传
2023-07-28 上传
2023-03-12 上传
2023-06-24 上传
2023-12-07 上传

文化的血脉
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
