CoDeSys运动控制解析:SMC_TRAFO与SMC_Interpolator
"该文档是关于CoDeSys的运动控制技术,主要涉及了SMC_TRAFO_Gantry3和SMC_Interpolator两个功能块的详细解释,涵盖了运动控制中的位置转换、插补算法以及紧急和慢速停止机制。"
在CoDeSys编程环境中,运动控制是一个关键部分,尤其在工业自动化系统中,它涉及到精准定位和路径规划。文档中提到的`SMC_TRAFO_Gantry3`模块是用于处理龙门架(Gantry)系统中的坐标变换。这个模块接收目标位置向量,通过`dOffsetX`和`dOffsetY`参数调整x和y轴的偏移量,同时`dx`和`dy`分别表示x和y轴的目标值。此外,`minX`, `maxX`, `minY`, `maxY`定义了移动范围,而`DriveX`和`DriveY`则关联了对应的驱动轴。`dnx`, `dny`, `dnOffsetX`, `dnOffsetY`是标准化的位置和偏移量,用于可视化目的,`ratio`则是x和y轴间隔的比例。
`SMC_Interpolator`功能块则是用于连续轨迹到离散位置点的转换,它考虑了速度轮廓和时间特性,以便生成适合驱动器的命令。当`bExecute`输入触发上升沿时,该模块开始处理轨迹。`poqDataIn`接收来自前级模块(如`SMC_NCDecoder`或`SMC_SmoothPath`)的轨迹信息。`bSlow_Stop`和`bEmergency_Stop`两个布尔变量提供了对运动的控制:`bSlow_Stop`如果设为TRUE,将在遵循速度轮廓的基础上安全减速至停止;`bEmergency_Stop`一旦设为TRUE,将立即停止运动并保持当前位置,速度瞬间降为0。`bWaitAtNextStop`可能涉及到在下一个停止点等待的逻辑,但具体用法未在摘要中详细说明。
这份文档对于理解如何在CoDeSys中进行复杂的运动控制,特别是龙门架系统的坐标变换和路径插补,提供了重要的参考资料。通过深入学习和应用这些功能块,开发者能够实现精确、平滑且安全的自动化设备运动控制。
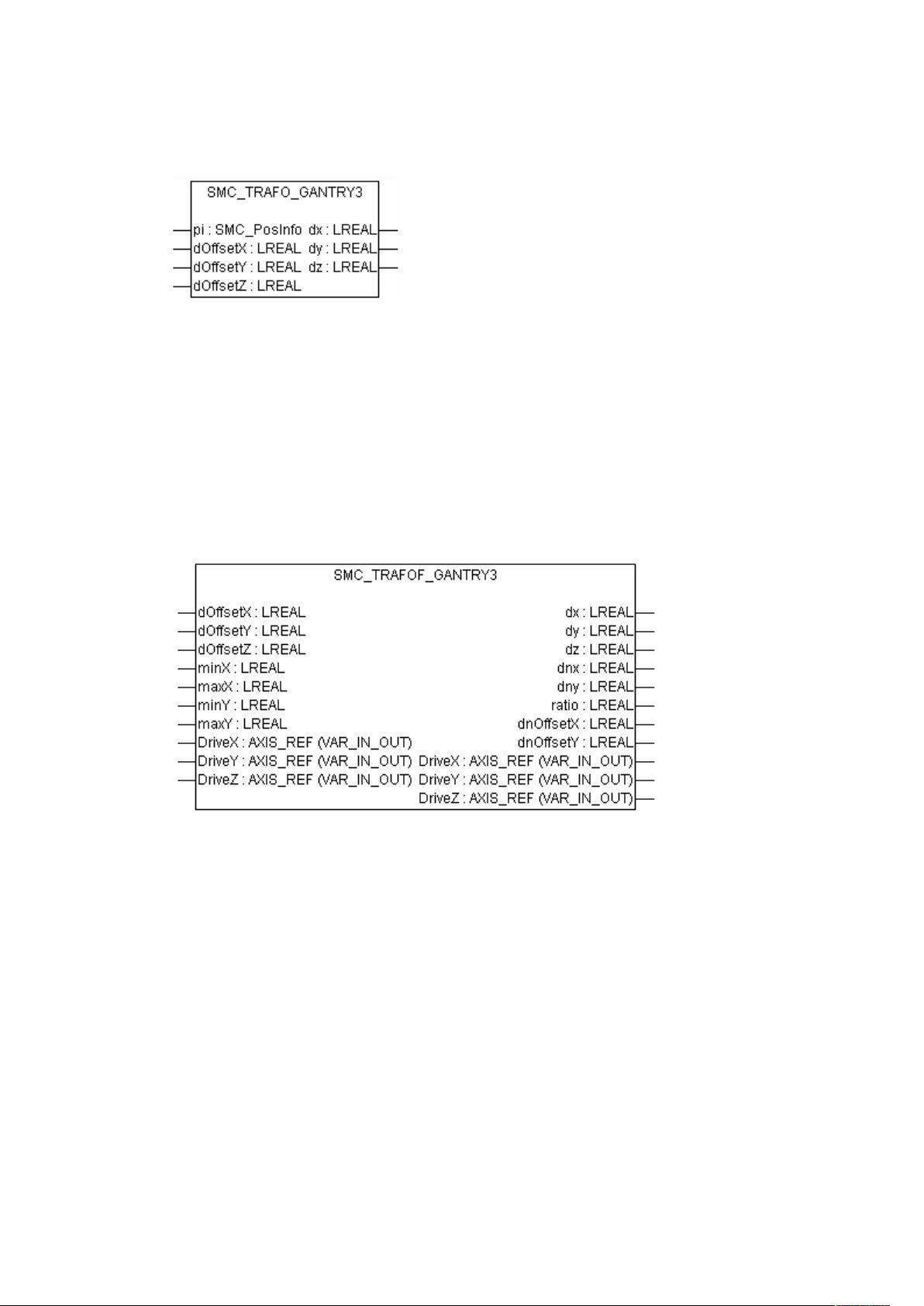
SMC_TRAFO_Gantry3
pi: SMC_PosInfo
目标位置向量。插补器的输出。
dOffsetX, dOffsetY: LREAL
x和y轴的偏移量。
dx, dy: LREAL
x和y轴的目标值
SMC_TRAFOF_Gantry3
dOffsetX, dOffsetY: LREAL
x和y轴的偏移量。与SMC_TRAFO_Gantry3模块的相同。
minX, maxX, minY, maxY: LREAL
移动范围(用于可视化部分)
DriveX, DriveY: AXIS_REF
x,y轴
dx, dy: LREAL
在GEO坐标系中x,y的位置。
dnx, dny, dnOffsetX, dnOffsetY: LREAL
x,y的标准化位置[0...1]和偏移量(用于可视化部分)
ratio: LREAL
x间隔和y间隔的比率。(用于可视化部分)
下载后可阅读完整内容,剩余4页未读,立即下载
2516 浏览量
3586 浏览量
189 浏览量
1543 浏览量
2021-09-30 上传
1037 浏览量
961 浏览量
1756 浏览量

jiuzhouqingyan
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 常见网络命令使用!!!
- 用C#实现的电子商务的文档
- proteus7.1+keil8.08
- 《AVR单片机的GCC软件设计》.pdf
- PLC控制电冰箱的灯光大小
- 全国计算机等级考试四级数据库工程师教程 课后答案
- 单片机基础教程-入门级
- 基于索引的SQL语句优化之降龙十八掌
- 如何在局域网安装Redmine(原创)
- 计算机网络答案 谢希仁
- E:\ATA认证复习题\70-228SQL Server 2000企业版的安装、配置和管理模.pdf
- Flex 性能简评:Flex 和 JavaServer Pages 应用程序的比较
- linux下的调试工具-GDB
- 2009软件设计师考试大纲
- ExtJS 最新实用简明教程
- FAT32文件系统中文版
