Cypress S25FL116K:高性能SPI闪存记忆体
"SPI Flash Memory S25FL116K"
S25FL116K是一款由Cypress Semiconductor Corporation生产的SPI串行闪存存储器,设计用于满足高速、低功耗的需求,适用于各种嵌入式系统和电子设备。这款SPI闪存提供16Mbit(2Mbyte)、32Mbit(4Mbyte)和64Mbit(8Mbyte)的不同存储容量,支持宽电压范围的3.0V SPI接口。
SPI(Serial Peripheral Interface)是一种常见的通信协议,用于微控制器与外部设备之间进行数据传输。S25FL116K支持SPI的多输入/输出(Multi-I/O)模式,可以使用4线或更多线配置,以提高数据传输速率。它还兼容SPIClock极性和相位模式0和3,这意味着它可以适应不同的系统配置。
在读取性能方面,S25FL116K提供了多种读取模式,包括正常读取、快速读取、双倍速读取和四倍速读取。正常读取速度高达50MHz(在-40°C到+85°C或105°C的温度范围内),而快速读取速度可达到108MHz。双倍速和四倍速读取模式进一步提升了速度,尤其是在四倍速读取模式下,对于S25FL164K型号,最高可达97MHz。这使得数据传输速率非常快,最大连续数据传输速率可达54MB/s,在-40°C到+85°C或105°C的温度范围内。
此外,S25FL116K支持高效的Execute-In-Place(XIP)功能,允许处理器直接从闪存执行代码,无需将数据加载到RAM,从而节省了系统资源。连续和环绕读取模式则优化了数据流处理,确保无缝的数据访问。S25FL116K还遵循Serial Flash Discoverable Parameters (SFDP) 标准,这是一个行业标准,使设备能被系统自动识别和配置。
在编程和擦除功能上,S25FL116K支持串行输入的页编程,一次最多可以编程256字节的数据,并具有编程暂停和恢复功能,方便在编程过程中中断和继续。它采用统一的4KB扇区擦除,确保数据安全且高效地清除。同时,该器件还支持块擦除和全芯片擦除操作,以适应不同级别的数据管理和更新需求。
S25FL116K是面向需要高速、大容量非易失性存储解决方案的应用的理想选择,如嵌入式控制系统、物联网设备、汽车电子、工业自动化和消费电子产品等。其强大的读取速度、灵活的读写模式以及对SPI协议的良好支持,使得它在众多SPI闪存产品中脱颖而出。
Document Number: 002-00497 Rev. *E Page 15 of 90
S25FL116K, S25FL132K, S25FL164K
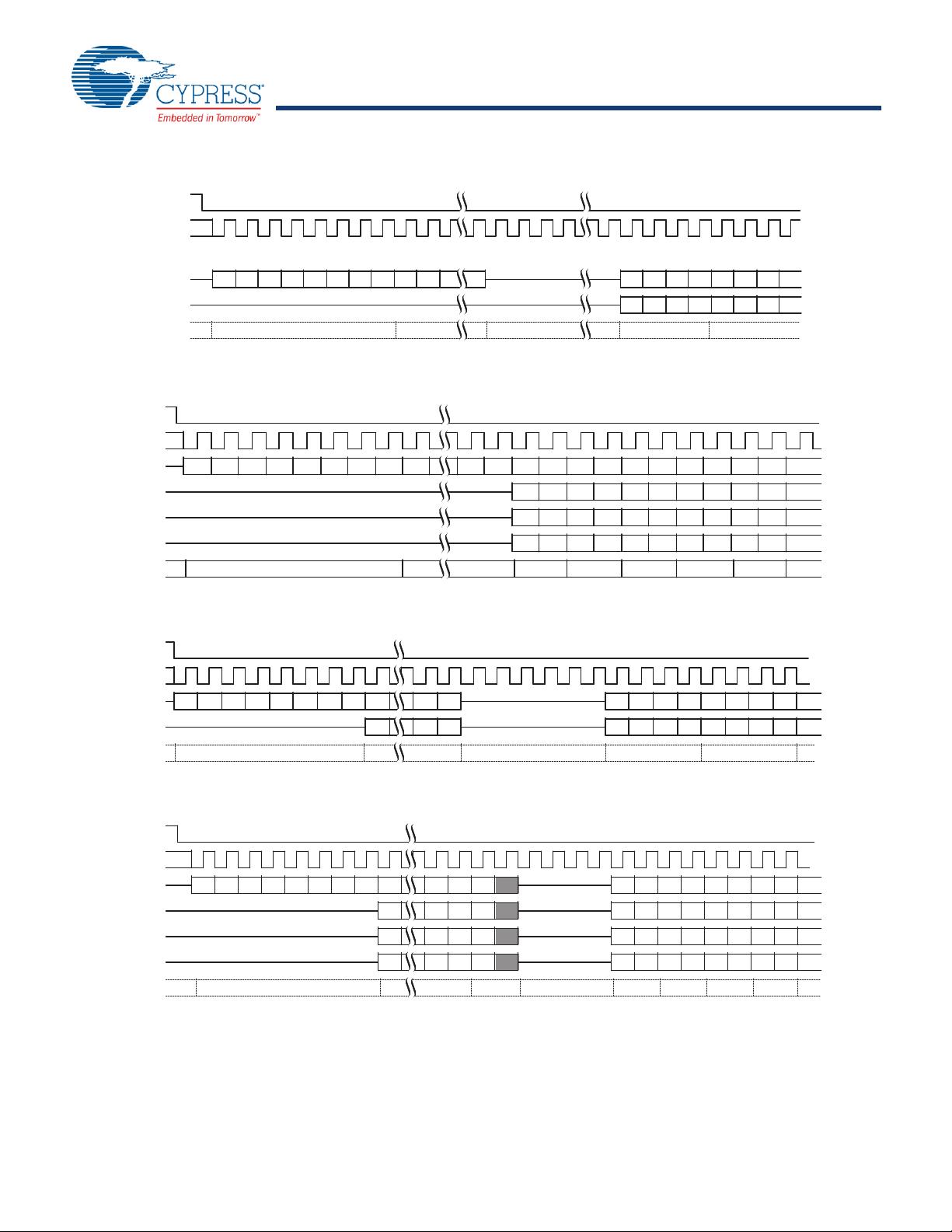
Figure 3.7 Dual Output Command
Figure 3.8 Quad Output Command without Latency
Figure 3.9 Dual I/O Command
Figure 3.10 Quad I/O Command
Additional sequence diagrams, specific to each command, are provided in Commands on page 63.
CS#
SCK
IO0
IO1
Phase
7 6 5 4 3 2 1 0 23 22 21 0 6 4 2 0 6 4 2 0
7 5 3 1 7 5 3 1
Instruction Dummy Data 1 Data 2
Address
CS#
SCK
IO0
IO1
IO2
IO3
Phase
7 6 5 4 3 2 1 0 23 1 0 4 0 4 0 4 0 4 0 4 0 4
5 1 5 1 5 1 5 1 5 1 5
6 2 6 2 6 2 6 2 6 2 6
7 3 7 3 7 3 7 3 7 3 7
Instruction Address Data 1 Data 2 Data 3 Data 4 Data 5 ...
CS#
SCK
IO0
IO1
Phase
7 6 5 4 3 2 1 0 22 2 0 6 4 2 0 6 4 2 0
23 3 1 7 5 3 1 7 5 3 1
Instruction Address Dummy Data 1 Data 2
CS#
SCK
IO0
IO1
IO2
IO3
Phase
7 6 5 4 3 2 1 0 20 4 0 4 4 0 4 0 4 0 4 0
21 5 1 5 5 1 5 1 5 1 5 1
22 6 2 6 6 2 6 2 6 2 6 2
23 7 3 7 7 3 7 3 7 3 7 3
Instruction Address Mode Dummy D1 D2 D3 D4


剩余89页未读,继续阅读
132 浏览量
2012-01-13 上传
2024-11-03 上传
2024-11-03 上传
2024-11-03 上传
2024-11-08 上传
2024-11-08 上传
2024-11-09 上传









