
DSP中的基于中的基于DSP的微位移步进电机控制方案的微位移步进电机控制方案
导读:本系统拟计划采用DSP控制步进电机推动轻装置移动实现测量装置的精准定位。系统拟采用的主控制器
为DSP28335,被控对象为最小步进角为1.8°的42步进电机,采用DSP输出PWM脉冲波通过电机驱动器摔制电
机的运行。 系统根据具体控制要求改变对PWM参数的设置,并通过相关的算法对过程参数进行修正以完成系统
目的。电机控制系统的控制精度为线位移10 μm,能够达到为实验室项目进行支持的目的,本系统亦可广泛应用
于电机控制领域。 0 引言 步进电机是将电脉冲信号转变为角位移或线位移的开环控制器件。在非超载的情况
下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,它
导读:本系统拟计划采用导读:本系统拟计划采用DSP控制步进电机推动轻装置移动实现测量装置的精准定位。系统拟采用的主控制器为控制步进电机推动轻装置移动实现测量装置的精准定位。系统拟采用的主控制器为
DSP28335,被控对象为最小步进角为,被控对象为最小步进角为1.8°的的42步进电机,采用步进电机,采用DSP输出输出PWM脉冲波通过电机驱动器摔制电机的运行。脉冲波通过电机驱动器摔制电机的运行。
系统根据具体控制要求改变对PWM参数的设置,并通过相关的算法对过程参数进行修正以完成系统目的。电机控制系统
的控制精度为线位移10 μm,能够达到为实验室项目进行支持的目的,本系统亦可广泛应用于电机控制领域。
0 引言
步进电机是将电脉冲信号转变为角位移或线位移的开环控制器件。在非超载的情况下,电机的转速、停止的位置只取决于
脉冲信号的频率和脉冲数,而不受负载变化的影响,它的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制
角位移量,从而达到准确定位的目的。为实现对步进电机的控制,一般可采用单片机为控制器,通过一些大规模集成电路来控
制其脉冲输出频率和脉冲输出数以实现步进电机的控制,然而整个系统的准确性、可靠性都存在缺陷。本系统是为实验室某项
目服务的子系统,系统的研究目的在于精确、快速、稳定地调节实验装置的相对移动,找到最佳位置、角度安放装置,故本系
统拟采用浮点型DSP28335作为系统控制器,拟采用其集成的PWM输出模块,减少外围电路的使用,提高了系统的可靠性和
系统的控制精度。
1 系统总体方案设计
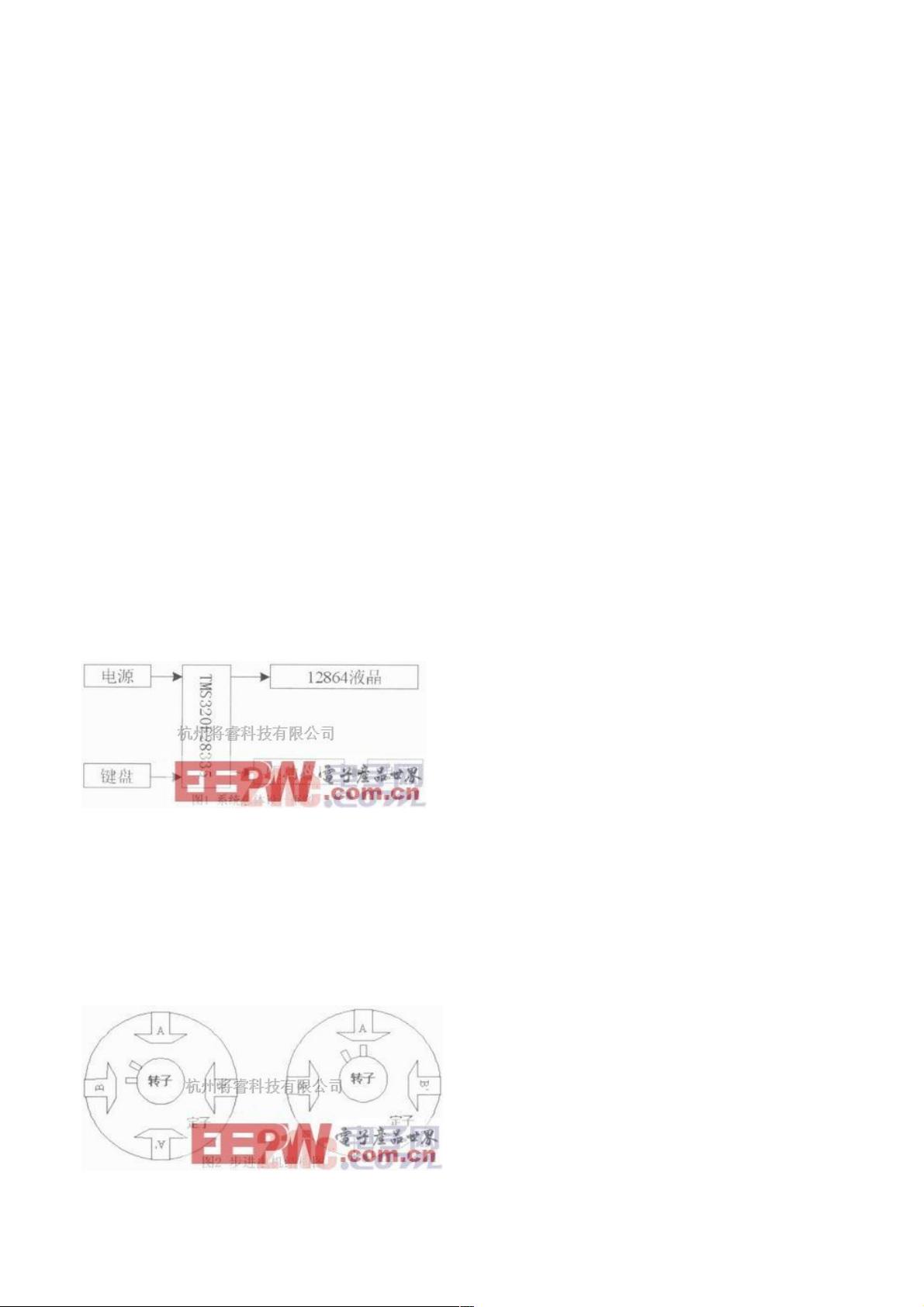
本系统总体设计框图如图1所示。拟采用数字信号处理芯片DSP28335根据控制算法输出一个特定的PWM脉冲序列,该脉
冲序列经由特定的步进电机驱动器实现对高精度的42步进电机的控制,通过控制算法自动或者手动调节电机的运行状态和运
行速度并送液晶实时显示。通过对系统点位的检测来判定是否达到系统的控制目的,最终通过一定算法完成系统安装位置的选
定。
2 系统硬件实现
本系统拟选用的主控制器为,其具有150MHz的高速处理能力,12位16通道ADC,具备32位浮点处理单元,有多达18路
的PWM输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM)。本系统中正是使用了其独立的PWM模块产生脉冲信
号。因课题需要精确定位故选用控制精度为1.8°的42步进电机实现装置推动,步进电机是将电脉冲信号转变为角位移或线位移
的开环控制元步进电机件,其结构图如图2所示。
从理论上讲,步进电机的驱动方式只需通过循环改变定子线圈励磁就能实现,但是由于电机对电路驱动能力要求高,故本
系统采用外接驱动芯片A3977,A3977细分驱动器采用高性能的专用微步距电脑控制芯片,其含内置转换器的完整的微步电动
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38529397
- 粉丝: 4
- 资源: 938
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


