计算机视觉:边缘与SUSAN算子详解
需积分: 9 129 浏览量
更新于2024-07-21
收藏 1.16MB PPT 举报
"计算机视觉第五章,主要涵盖了基元检测,特别是边缘检测,包括一阶导数算子、二阶导数算子以及SUSAN算子等方法,并讨论了边缘闭合和角点检测。"
在计算机视觉领域,基元检测是图像分析的核心组成部分,其中边缘检测扮演着至关重要的角色。边缘是图像中像素灰度值发生显著变化的边界,它是图像特征的基础,可以用于识别图像中的物体和结构。边缘检测是赋予单个像素一种属性,基于图像函数在该像素周围邻域内的梯度特性来确定。
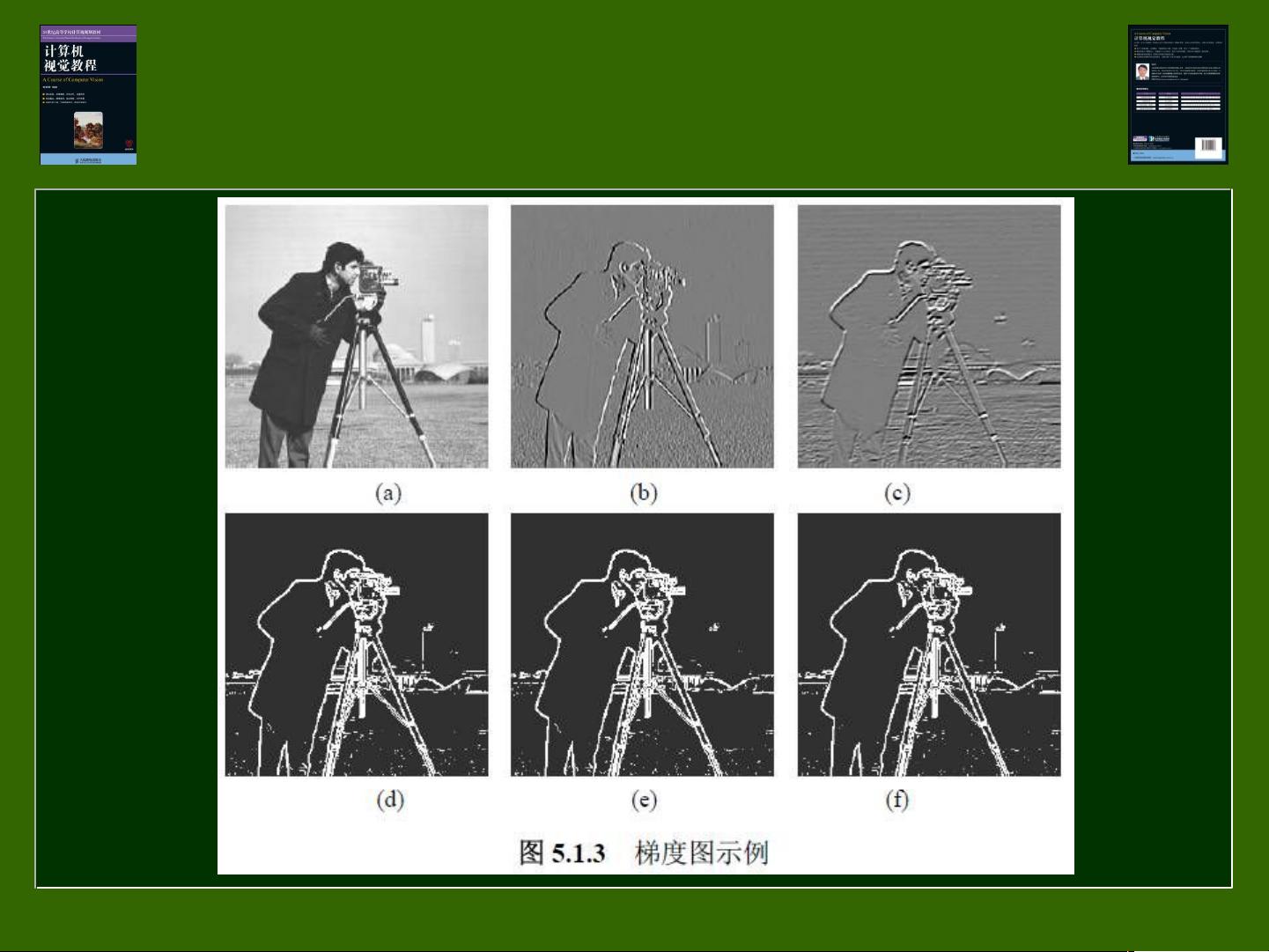
5.1章节详细讲解了边缘检测。5.1.1部分介绍了三种类型的边缘:阶梯状边缘、脉冲状边缘和屋顶状边缘,这些不同的边缘形状需要不同策略来检测。5.1.2章节探讨了一阶导数算子,如罗伯特交叉算子、蒲瑞维特算子和索贝尔算子,它们通过计算图像在X和Y方向的偏导数分量来检测边缘,因为一阶导数表示图像的梯度信息。5.1.3章节则涉及二阶导数算子,如拉普拉斯算子和马尔算子,马尔算子通常结合高斯平滑进行边缘检测以提高信噪比。拉普拉斯算子对中心像素的系数要求是正,邻近像素的系数是负,且总和为零,以确保边缘检测的准确性。5.1.4章节讲述了边界闭合,即如何通过比较边缘像素的梯度幅度和方向来连接相似的边缘像素。
5.2章节介绍SUSAN算子,这是一种用于角点和边缘检测的方法。SUSAN(Simple,Unsupervised and Scalable Image Noise Re Moval)的核心思想是寻找与核像素具有相似灰度值的区域(USAN)。5.2.1章节解释了USAN原理,5.2.2章节则详细阐述了角点检测和边缘检测的过程,包括使用圆形模板进行比较,输出游程和边缘响应,以及计算角点稳定性的公式。此外,SUSAN算子还能检测边缘方向,并且在进行检测时不需要预先设定阈值,这使得它在处理不同光照和噪声条件下的图像时更为鲁棒。
总结来说,本章深入探讨了边缘检测的各种方法,包括经典的导数算子和高级的SUSAN算子,这些方法对于理解和实现计算机视觉系统中的图像分析至关重要。通过学习这些内容,我们可以更好地理解如何从图像中提取关键信息,从而进行更复杂的图像理解和识别任务。
5-6
第 5 章
5.1.2 一阶导数算子
剩余26页未读,继续阅读
444 浏览量
2021-05-29 上传
2008-10-17 上传
2025-01-19 上传
123 浏览量
136 浏览量
3240 浏览量

mrhy2454966550
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#高效多线程下载器组件源码V1.12发布
- 32位Windows汇编语言程序设计大全
- Sketch插件库替换器:简化库更换流程
- 首版投资组合网站的开发与部署指南
- C语言实现农历与阳历转换的新库发布
- 探索Linux下的Vim优雅配色方案:Colibri.vim
- STM32 TFT显示技术与刷屏方法解析
- STM32单片机控制交通灯毕设资料整合
- Vitamio实现后台Service播放m3u8音频流
- 使用Docker封装的Alpine版Vim体验
- 步步高高级版WarNards开源项目发布
- 使用JNI实现Java调用VC6 DLL与Linux SO的DEMO教程
- STM32与OLED显示技术的实践应用
- 全面技术覆盖的小区物业管理系统设计与源码
- 清华版编译原理专业课答案解析
- Linux系统下nginx添加SSL配置的详细步骤
