H∞控制器下的柔性机械手优化设计与鲁棒性研究
需积分: 5 180 浏览量
更新于2024-08-11
收藏 247KB PDF 举报
本文主要探讨了"基于H∞控制器的柔性机械手优化设计研究"这一主题,由屠立、曹焕亚和周圣宣三位作者共同完成,发表于2007年的学术期刊上。柔性机械手因其在工业自动化中的广泛应用而备受关注,尤其是在处理手臂变形时,由于涉及到复杂的柔性和参数分布式系统,设计难度较大。H∞控制技术在此背景下被引入,作为一种先进的控制策略,其核心在于通过最小化系统输出的均方误差来提高控制性能和稳定性。
研究者首先识别了柔性机械手设计中的关键挑战,即手臂的动态响应受到多参数分布系统的复杂影响,以及子系统间的相互作用。为了克服这些难题,他们采用了H∞控制方法,这种方法强调的是系统在面对不确定性(如参数变化、模型不精确等)时的稳健性,能有效降低这些因素对系统性能的影响。
在设计过程中,作者深入分析了模型的不确定性,并将其量化,这是H∞控制理论的重要组成部分。通过这种方式,他们能够建立广义系统的空间状态方程,这是一个全面描述系统动态行为的关键工具。通过这个方程,他们设计了一个稳定的闭环H∞控制器,确保了系统的稳定性,同时提高了模型的精度。
本文进一步考察了控制器在应对阶跃输入和外部扰动时的表现。通过数值模拟,展示了在不同情况下系统的响应特性,结果显示了系统的优良鲁棒性,即使在面临外部干扰时也能保持稳定的性能。这表明,采用H∞控制技术的柔性机械手能够在实际操作中表现出高度的适应性和可靠性。
这篇文章不仅提供了柔性机械手优化设计的新思路,还展示了H∞控制技术在解决复杂系统问题中的实用价值。这对于推动机电设计领域的理论发展和技术进步具有重要意义,也为未来相关领域的研究者提供了宝贵的研究参考。
基于
H
∞控制器的柔性机械手优化设计研究一一屠
立
曹焕亚周巫宣
基于
H
∞控制器的柔性机械手优化设计研究
屠立1,
2
曹焕亚
1
周圣宣
3
1.浙江机电职业技术学院,杭州,
310053
2.
浙江大学,杭州,
310027
3.
美国亚利桑那大学,图森,美国,
85721
摘要:针对柔性机械手设计中手臂变形涉及的柔性和参数分布式系统的复杂性,采用
H
∞控制技术
对柔性机械手进行优化设计。在设计过程中,考虑了参数分布式系统中各子系统之间的相互作用,分析
了模型的不确定性并进行了定量描述,导出了广义苯直的空间状态方程。设计了具有稳定闭环的
H
∞
控制器,减小了系统的不确定性和扰动所产生的各种影响,从而解决了控制问题和模型精度问题。对阶
跃输入和扰动的响应进行了研究,给出了各种情形的数值结果,显示系统具有良好的鲁棒性。
关键词:柔性机械手;机电设计;空间状态方程
;H
∞控制器
中图分类号:
TP241
文章编号
:1004--132X(2007)11--1359
一
04
Optimal
Design
of
Flexible
Manipulator
ßased
on
H
∞
Controller
Tu
Li
1.
2
Cao
Huanya
1
Zhou
Pixuan
3
1.
Zhejiang
Mechanical
&.
Electrical
College
,
Hangzhou
, 310053
2.
Zhejiang
University
,
Hangzhou
, 310027
3.
The
University
of
Arizona
,
Tucson
,
AZ
,
USA
, 85721
Abstract:
Aiming
at
the
flexibility
involved
with
link
deformation
and
the
complexity
of
distribu-
t
巳
d
parameter
systems
in
flexible
manipulator
design
,
the
H
∞
control
technique
was
used
in
optimal
design
,
the
coupling
effects
among
subsystems
were
taken
into
account.
The
model
uncertainty
was
analysed
and
described
quantitatively
,
the
state-
space
equation
for
the
generalized
plant
was
derived.
H
∞
controller
was
designed
that
internally
stabilized
the
closed
一
loop
system
and
minimized
all
im-
pacts
from
system
uncertainties
and
disturbances
to
solve
the
control
and
modeling
accuracy
problems.
And
then
,
the
responses
for
step-
type
disturbance
and
step
input
were
carried
out
and
num
巳
rical
re-
sults
to
various
cases
were
presented
to
show
the
system
robustness.
Key
words:
flexible
manipulator;
mechatronic
design;
state-space
equation
;
H=
controller
O
引言
H
∞控制器主要应用在复杂系统如参数分布
系统的稳定控制上。
Foias
等
[IJ
推导出用于
H
∞
控制的相关公式,并将其用于柔性机械手的控制,
其侧重点在于频率范围的控制应用。
Balas[2J
在
机械手柔性结构设计中进一步应用了
H
∞控制方
法。
Sideris
等
[3J
提出了一种组合频率与时间范
围的约束控制新技术。
Doyle
等[
4J
和
Glover
等
[5J
采用频率加权传递函数对广义装置的
H
∞范数提
出了空间状态解决方案,因其方案采用内部稳定
的闭环系统,可使误差传递函数的范数最小化。
H
∞控制技术应用的主要问题就是如何建立
适当的控制模型,以克服系统设计中动态行为的
不确定性。为此,本文分析了空间状态模型的不
确定性,研究了频率加权函数的广义装置,并且设
计了鲁棒性好的
H
∞控制器。
收稿日期
:2006
一
11-24
基金项目
z
国家自然科学基金资助项目
(50275091)
1
H
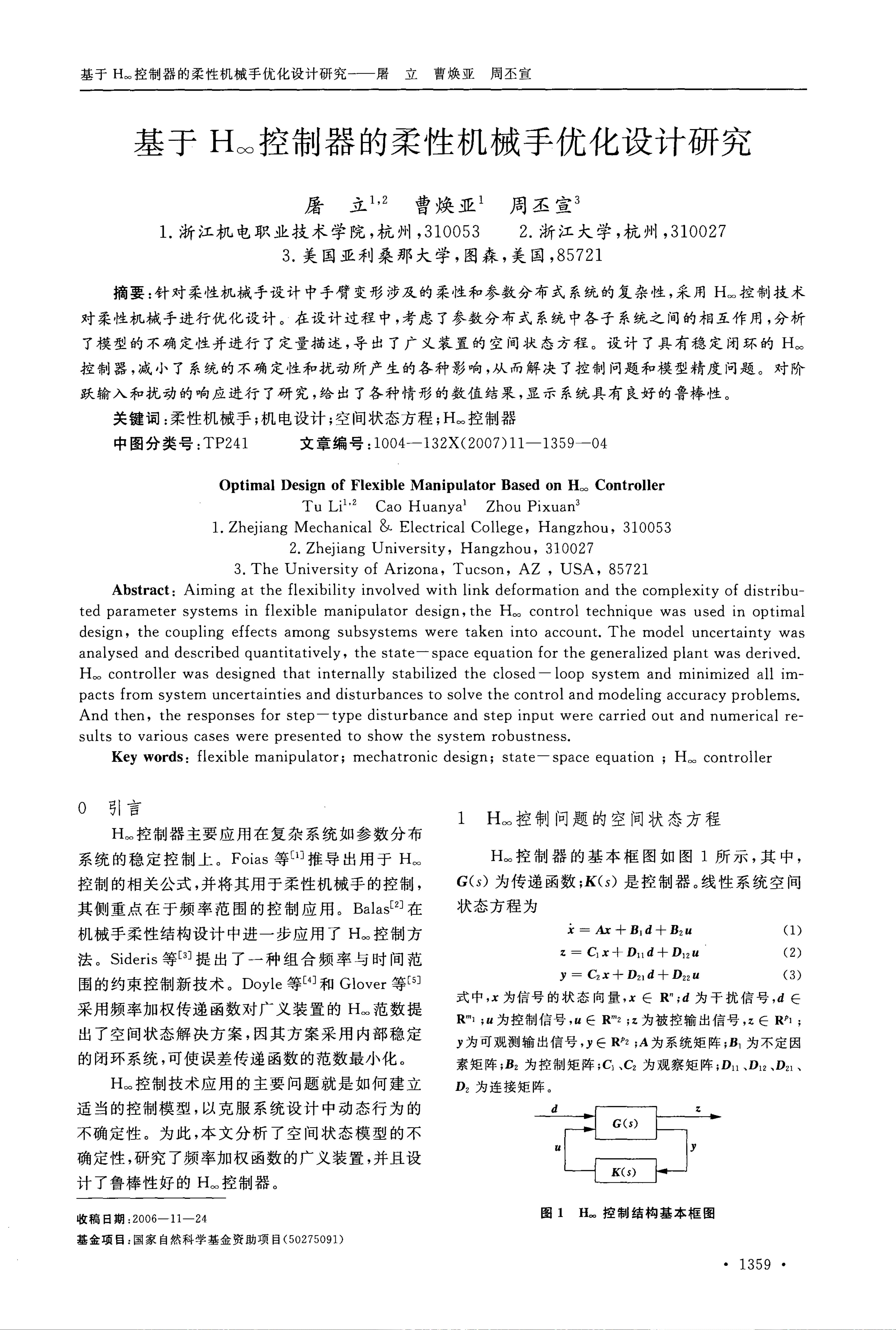
∞控制问题的空间状态方程
H
∞控制器的基本框图如图
1
所示,其中,
G(s)
为传递函数
;K(s)
是控制器。线性系统空间
状态方程为
x = Ax + Bl d + B, u
z =
C1x
十
Dlld
+
D1
,u
(1)
(2)
y =
C
,
x
十
D'ld+D"u
(3)
式中
,
X
为信号的状态向量
,
X
εR"
;d
为干扰信号,
dε
Rm
1
;U
为控制信号
,
u
εR
m
2
;z
为被控输出信号,
z
EERP1;
y
为可观测输出信号
,
y
ε
RP'
;A
为系统矩阵
;Bl
为不定因
素矩阵
;B
,
为控制矩阵;矶、
C
,为观察矩阵
;D11
、
D
1
,、
D'l
、
D
,为连接矩阵。
4
z
G(s)
U
y
K(s)
图
1
日∞控制结构基本框图
• 1359 •
下载后可阅读完整内容,剩余3页未读,立即下载
2019-10-29 上传
2021-05-25 上传
2021-05-22 上传
2021-05-27 上传
2021-03-06 上传
2021-08-07 上传
2021-05-31 上传
2021-05-09 上传

weixin_38741966
- 粉丝: 2
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
