螺旋轮式管道机器人设计与仿真研究
版权申诉
66 浏览量
更新于2024-06-23
收藏 1.52MB DOC 举报
"该文档主要探讨了管道机器人的设计与仿真,特别是螺旋轮式的管道机器人。它详述了机器人的设计任务,运动方式,行走机构,以及在不同管道环境中的通过性分析。此外,还涵盖了监控控制系统,包括探测头的选择,检测系统,单片机控制,以及机器人与主控计算机的通信。最后,讨论了行程计算和机器人的应用前景。"
本文档首先介绍了管道机器人设计的背景和意义,指出其在管道检测、探伤和定位中的重要作用。随着管道老化、堵塞等问题的出现,机器人成为有效的解决方案。接着,文档回顾了国内外管道微型机器人的发展现状,特别关注了油气管道领域,强调了螺旋轮式管道机器人的优势。
在螺旋轮式管道机器人的总体方案设计部分,文档比较了轮式和蠕动式两种运动方式,选择了螺旋轮式并解析了其运动机理。机器人行走机构的分析与设计包括旋转轮结构、电机选择、连接轴设计、弹簧选取、支撑轮和电机的固定方案,以及探测头的定位方法。
接下来,文档分析了管道机器人在管中运动的通过性,考虑了管道环境对机器人的几何约束。监视控制系统部分,探讨了探测头的选择,检测系统的构建,采用单片机进行控制,并编写了相应的控制程序,包括H桥式驱动电路和机器人与主控计算机的通信协议。
行程的计算部分,文档可能涉及了机器人在管道中的行进距离和时间估算。最后,展望了管道机器人在油气输送管道、油气井和其他管道中的应用前景,强调其在石油工业中的潜在价值。
整个文档深入浅出地阐述了管道机器人的设计原理和技术细节,对于理解这类机器人的工作机制和设计过程提供了全面的指导。
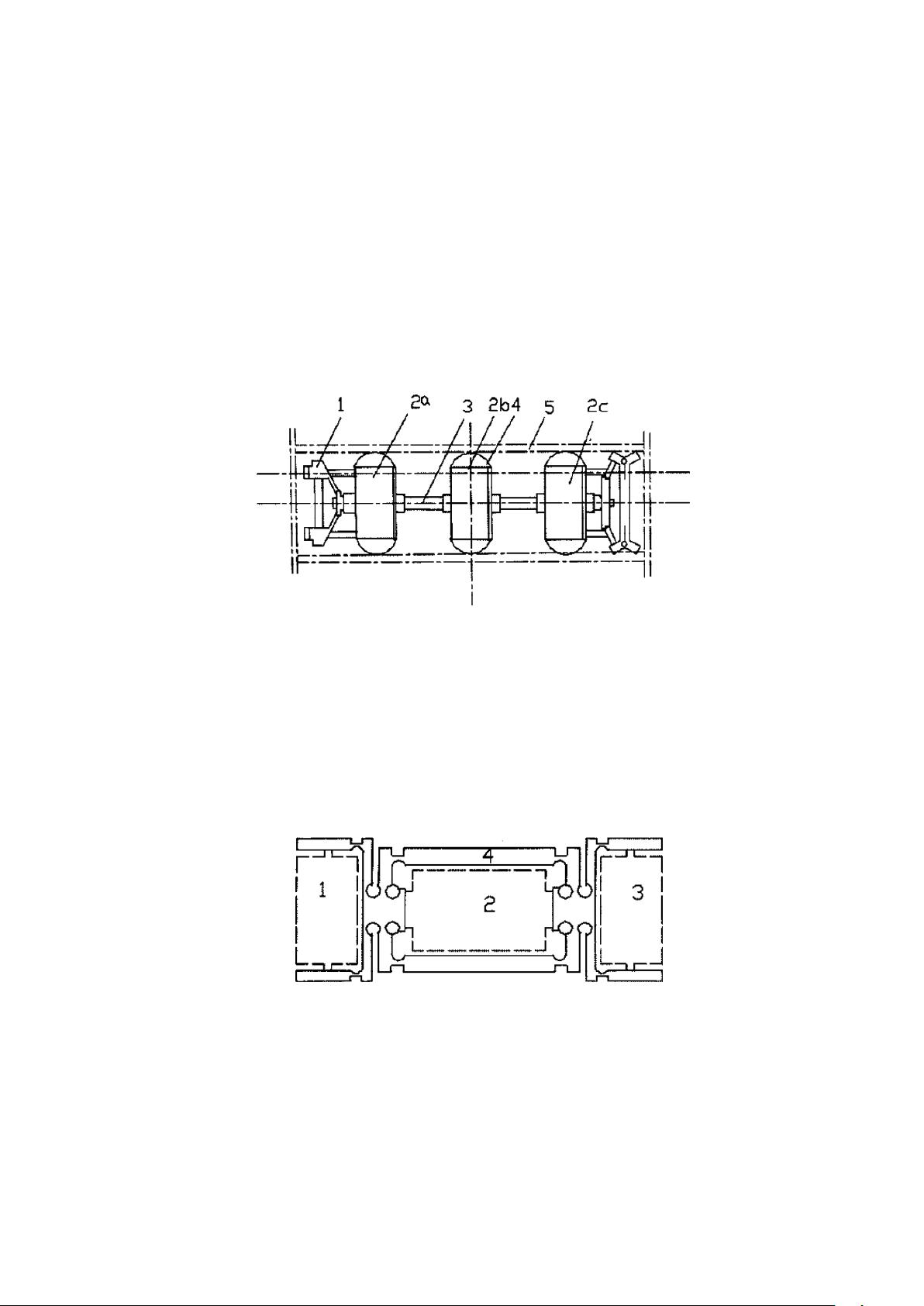
1.2.1.3 蠕动式
上海交通大学研发了小口径管道内蠕动式移动机构如图 1-3,它是模仿昆虫在地
面上爬行时蠕动前进与后退的动作设计的。其主要机构由(1)撑脚机构、 (2)气
缸、(3)软轴、(4)弹簧片、(5)法兰盘组成。蠕动运动为:气缸 2a 动作,气缸活
塞左移,松开前撑脚;气缸 2c 动作,气缸活塞左移,撑紧后撑脚;气缸 2b 动作,
气缸活塞左移,使气缸 2a 前进;气缸 2a 动作,气缸活塞左移,撑紧前撑脚;气缸 2c
动作,气缸活塞左移,松开后撑脚;气缸 2b 动作,气缸活塞右移,使气缸 2c 前进。
图 1-3 利用空气压力的蠕动式机器人
清华大学研制了一套小型蠕动机器人系统,其机构如图 1-4,由 1 蠕动体和 2、
3、4 电致伸缩微位移器组成。蠕动体的蠕动变形形态由粘贴于柔性铰链部位的电阻
应变实时感,机器人的外形尺寸为 150x61x46mm,重 2kg,最大步距 10μm,行程 40mm,
运动精度 0.2 μm。
图 1-4 蠕动体结构示意图
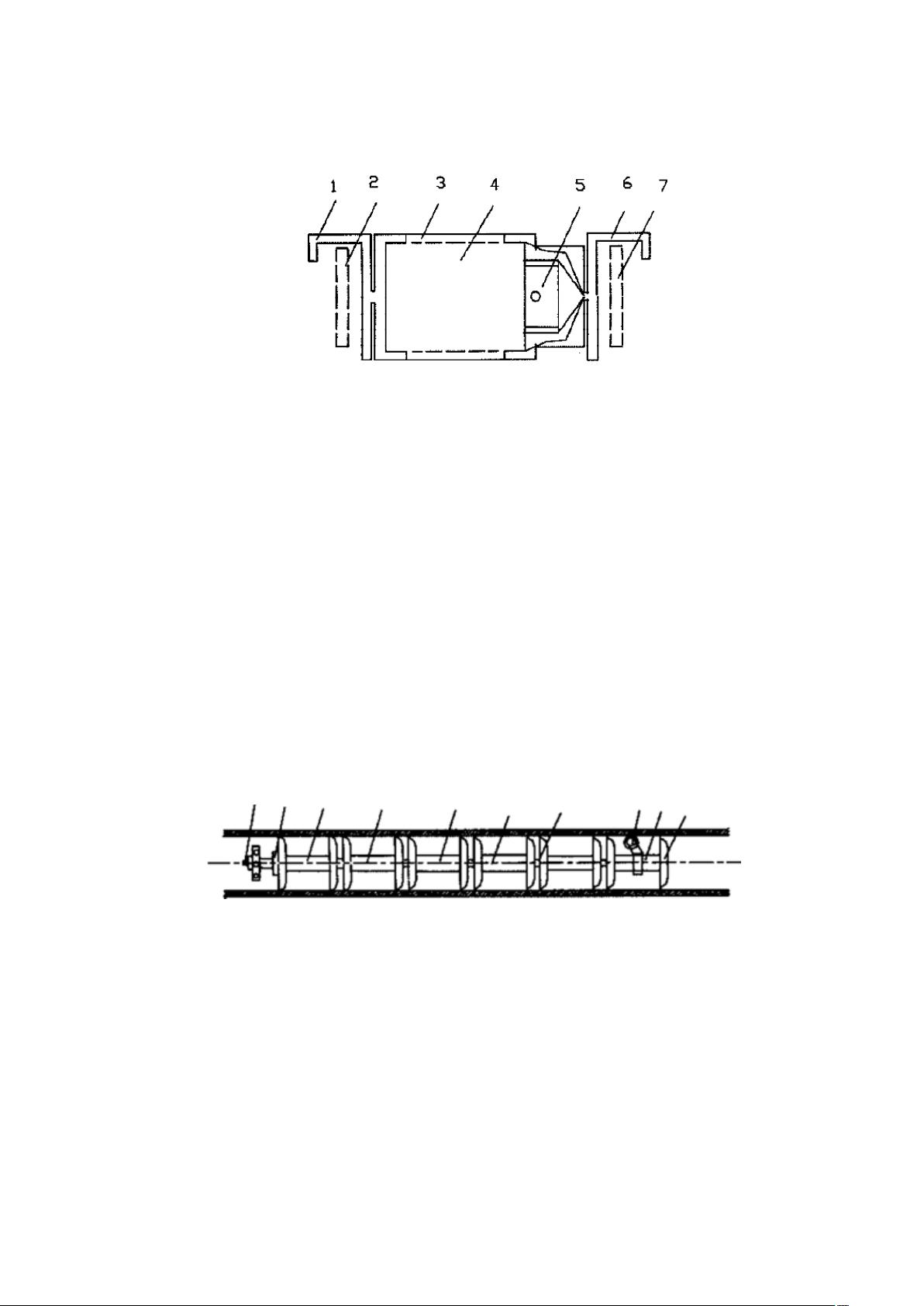
西安交通大学以电致伸缩陶瓷微位移器做驱动器,电磁铁机构做可吸附于行走表
面的保持器,设计制作了蠕动式微动直线自行走机构如图 1-5。由簧片组 3 与左右支
架 1、6 联接成一体,作为电致伸缩陶瓷微位移器 4 的载体,驱动器 4 的一端与支架
1 的侧面贴和,另一端与螺钉 5 的端面贴和。螺钉 5 为细牙螺纹,转动调节螺钉 5,
剩余35页未读,继续阅读
2023-07-11 上传
2023-07-12 上传
2022-05-13 上传
2023-07-12 上传
2023-07-15 上传
2022-12-06 上传

老帽爬新坡
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++解析PDF文件的源码示例
- ClassStuffdotjpg:课堂博客
- choco-cpviz:Choco3的扩展以处理cpviz librairie
- 主要用于学习mysql.zip
- capstan:基于Apache Flink的项目
- InfInstall VC++ inf安装程序
- Jenkins-webapp
- 喵API
- jsCodeDemo:JavaScript 模拟实现前端常见函数,算法面试题
- dfs-proxy:杂草dfs代理
- lpnyc:学习 Python NYC 的 TDD(测试驱动演示)旨在成为一个元包,可以自动测试发现针对 Python 2 和 3 运行的单元测试
- 这是我在学习《php 和MySql Web 开发》过程中所写的代码.zip
- api-spec-modules:用于实现REST API的一组可重用的规范
- VC++ 6.0远程备份下载程序
- gxsd-android-tch_stu:高速速读_老师端和学生端
- guess-the-number
