基于组态软件的多级皮带机PLC控制系统设计
47 浏览量
更新于2024-06-24
收藏 1.06MB DOC 举报
"基于组态软件的多级皮带机PLC控制系统设计"
本文主要探讨了如何利用组态软件设计一个多级皮带机的PLC(可编程逻辑控制器)控制系统,以此解决工业生产中的实时监控与自动化控制问题。该设计以南阳理工学院电子与电气工程系的一份本科生毕业设计论文为背景,专业方向为电气工程及其自动化。
在设计过程中,首先,针对四级皮带机的控制需求进行了深入的分析,确定了控制流程。PLC作为核心控制器,其硬件电路设计是关键步骤。设计中选择了欧姆龙(Omron)品牌的PLC,它以其稳定性和灵活性在工业自动化领域广泛应用。随后,利用欧姆龙PLC的编程语言编写控制程序,并在实验箱上进行调试,确保硬件与软件的协同工作。
同时,文章强调了上位机组态软件的重要性。组态软件是一种图形化编程工具,允许用户根据控制对象和具体要求构建监控界面。在本设计中,通过组态软件,创建了与实际设备相对应的监控界面,实现了组态界面与PLC之间的实时通信、数据交换和显示。这种通信机制使得操作人员能直观地监控皮带机的运行状态,并进行远程控制,提高了系统的自动化程度和管理效率。
关键词包括:欧姆龙PLC,皮带机,组态软件,监控系统。这些关键词揭示了设计的核心技术和应用领域,其中欧姆龙PLC是实现控制的关键硬件,皮带机是被控制的对象,组态软件是实现人机交互和监控的关键工具,而监控系统则是整个设计的最终目标。
这篇论文详细阐述了基于组态软件的多级皮带机PLC控制系统的完整设计过程,从硬件选择、程序编写到监控界面的构建,为工业自动化领域的类似项目提供了参考和实践指导。

基于组态软件的多级皮带机 PLC 控制系统设计
2
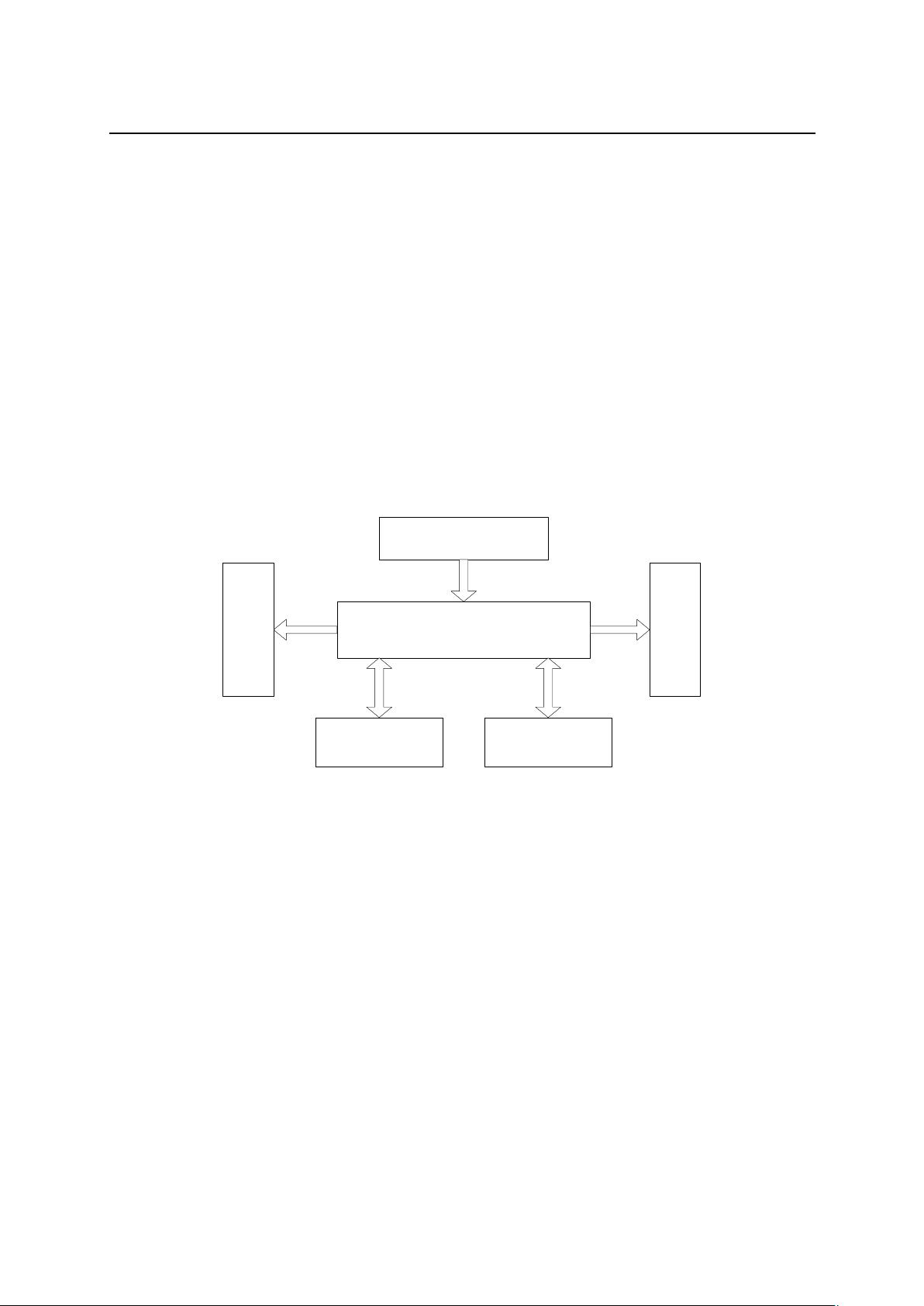
产自动监控理念应用于实际的皮带机监控系统,用一台微型计算机作为监控系统的上位
机,通过组态软件、工业控制网络和 PLC 相连,实现对现场数据的巡回采集、集中处理,
从而最终实现对工业自动化系统的分散检测控制与集中监控管理
[1]
。
1.2 本课题的主要设计内容及控制要求
本次课题的任务是基于组态的多级皮带机 PLC 控制系统的设计、安装、调试,根据
要求下面以四级皮带机为例来说明具体的设计内容和控制要求。
设计内容如下:
(1)控制系统的总体方案设计。
(2)PLC 控制系统的软、硬件设计。
(3)利用组态王 6.5 仿真软件对多级皮带机双向启动系统进行画面组态。
(4)系统测试、联调及模拟调试。
控制要求如下:
(1)某一生产线由四级皮带运输机组成,四级皮带机分别由分别 M1,M2,M3,M4 四
台电动机拖动,有顺流启动和逆流启动两种启动控制方式,并且这两种控制程序可以随
时切换。
(2)顺流启动时,当有料进入皮带机后通过一号皮带机上的物料检测传感器 1 让
皮带机运行,并按照 M1→M2→M3→M4 的顺序启动,间隔时间均为 3 秒钟。若无料进入
皮带,则通过压力传感器 1 的检测 30 秒后让皮带机按 M4→M3→M2→M1 的顺序依次停止
否则继续运行,如此循环往复。当某条皮带机发生故障时,所有皮带机都立即停止运行。
逆流启动时要求一样。
(3)为防止在运行时传感器误动作,要求按下系统保护按钮后,系统才处于待运
行状态,否则传感器不动作。
(4)为保障以外发生时的安全,还要有急停按钮,当急停按钮按下时所有的电机
立即停止运行。
(5)要有必要的短路、过载、连锁保护。
2 相关软件介绍及监控系统总体设计
2.1 欧姆龙 PLC 简介
(1)OMRON C 系列 PLC 简介
日本 OMRON(立石公司)电机株式会社是世界上生产 PLC 的著名厂商之一。SYSMAC
C 系列 PLC 产品以其良好的性能价格比被广泛地应用于化学工业、食品加工、材料处理
和工业控制过程等领域,其产品在日本其销量仅次于三菱,居第二位,在我国也是应用
剩余35页未读,继续阅读
2023-06-28 上传
2021-08-08 上传
点击了解资源详情
2021-08-07 上传
2023-06-24 上传

matlab大师
- 粉丝: 2726
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
