低阶鲁棒控制器设计:同伦法在跟踪系统中的应用
需积分: 11 91 浏览量
更新于2024-08-11
收藏 313KB PDF 举报
"基于同伦法的跟踪系统鲁棒控制器设计 (2012年)"
本文主要探讨了在控制系统设计中如何解决传统鲁棒控制器阶数过高的问题,提出了一种新的具有阶次限制的鲁棒控制器设计方法。该方法特别关注于降低控制器的复杂性,以提高系统的实用性和效率。
在传统控制系统中,鲁棒控制器的设计通常基于H∞控制理论,这需要选择合适的加权函数来反映系统的干扰和噪声特性。然而,这种方法可能导致控制器阶数较高,增加了系统的实现难度和成本。为了克服这一问题,作者引入了Nevanlinna-Pick插值方法,它将鲁棒控制器设计转化为求解一组非线性方程的根,从而避免了选择加权函数的复杂过程。
同伦法在这里被用来设计低阶鲁棒控制器。同伦法是一种数学工具,用于解决连续依赖问题,它可以逐步地从一个已知解向目标解逼近,从而简化复杂问题的求解。通过应用同伦法,可以有效地降低控制器的阶数,同时保持足够的鲁棒性和控制性能。
在实际的仿真实验中,研究人员对比了新设计的鲁棒控制器与传统的滞后超前校正方法。实验结果显示,新控制器在保证跟踪精度的同时,表现出强大的干扰抑制能力。即使在系统存在不确定性的情况下,采用新控制器的闭环系统仍能保持良好的鲁棒性,展现出对系统参数变化和外部干扰的适应性。
关键词如“同伦法”、“鲁棒控制”、“Nevanlinna-Pick插值”、“跟踪系统”和“阶次约束”揭示了本文的核心研究内容。其中,“同伦法”是解决问题的关键工具,它允许在控制器设计中引入阶次限制,以减少控制器的复杂性。“Nevanlinna-Pick插值”是数学上的一个技术,有助于简化控制器设计问题。“跟踪系统”和“阶次约束”强调了研究的工程背景和目标,即设计能够准确跟踪目标且阶数较低的控制器。“干扰抑制”则是评价控制器性能的重要标准,表明新设计的控制器在应对不确定性方面具有优越性。
这篇论文提供了一种创新的控制器设计策略,它结合了同伦法和Nevanlinna-Pick插值,以实现低阶、高效且鲁棒的跟踪控制系统。这种方法对工业应用和控制系统设计领域具有重要的理论和实践价值。
大庆石油学院学报
JOURNAL
OF
DAQING
PETROLEUM
INSTITUTE
第
36
卷第
1
期
2012
年
2
月
Vo
l.
36
No.
1
Feb.
2012
基于同伦法的跟踪系统
棒控制器设计
王常虹
l
,刘斌
1
,
2
,陈国成
2
,姜春雷
2
,刘
均
2
(
1.哈尔滨工业大学空间控制与惯性技术研究中心,黑龙江哈尔滨
150080;
2.
东北石油大学电气信息工程学院,
黑龙江大庆
163318 )
摘
要:针对传统控制系统鲁棒控制器阶数较高的缺陷,提出一种具有阶次限制的鲁棒控制器设计方法.利用
Ne
vanlinna-Pick
插值方法,将鲁棒控制器设计问题转化为求解非线性方程的根,避免选择
Hω
控制中加权函数.基于同伦法
设计低阶鲁棒控制器,通过仿真实验研究该鲁棒控制器下的阶跃响应,以及存在外部干扰时系统的控制性能及干扰抑制
能力,并与传统滞后超前校正方法进行比较.结果表明.该控制器不仅能够在保证跟踪精度前提下具有较强干扰抑制能
力,而且当系统存在不确定性时,闭环控制系统具有很好的鲁棒性.
关
键 词:同伦法;鲁棒控制;
Nevanlinna-Pick
插值;跟踪系统,阶次约束;干扰抑制
中图分类号
:V448
文献标识码
:A
文章编号:
1000 - 189
1(
2012)01
- 0068 - 05
O
引言
鲁棒性作为反馈控制系统设计的重要指标,得到人们广泛研究口气传统鲁棒控制器设计以
H
∞性能
作为指标,采用加权函数法
[I].
加权函数法反映干扰和噪声的频谱,或输出灵敏度函数形状,控制系统设计
转化为加权信号在某种意义下最小化问题.选择加权函数没有通用方法,即使同一设计指标,对于不同控
制系统,不同设计者的选择也不相同.无论是灵敏度最小化问题还是棍合灵敏度问题,阶数较高的加权函
数产生高阶的灵敏度或补灵敏度函数,使控制器阶次较高,研究具有阶次约束的有理插值多项式具有重要
意义.
Gahinet
P
、
Skelton
R
E
等针对传统
H=
控制缺陷提出具有阶次限制的控制器设计方法
[4
叭用线性
矩阵不等式描述性能指标和鲁棒性,同时增加秩约束限制矩阵维数.李艳辉等基于
H
∞性能准则和投影引
理,得到容许的降阶模型存在的充分条件,通过锥补线性化方法求解该降阶模型时,并将其用于汽车主动
悬架系统的鲁棒
L
1
/H
∞多目标控制[7].
Byrnes C 1, Georgiou
T
等提出基于广义摘准则的
Nevanlinna
Pick(
简称
NP)
插值方法,为处理反馈控制系统中
McMillan
阶数提供新思路
[8-1
口,
NP
插值方法不仅可以
用于控制领域【卜时,而且在信号处理、电路理论等方面有广泛应用也
I0·1213].
笔者提出基于同伦法的鲁棒控制器设计方法,与传统
H
∞控制方法相比,该方法不使用加权函数设计
鲁棒控制器,可避免使用加权函数带来的缺陷,而且控制器阶次较低.仿真实验结果表明,当存在外部干扰
及模型不确定性时,该鲁棒控制器具有良好的控制效果和干扰抑制能力.
1
鲁棒控制与
N
evanlinna-Pick
插值
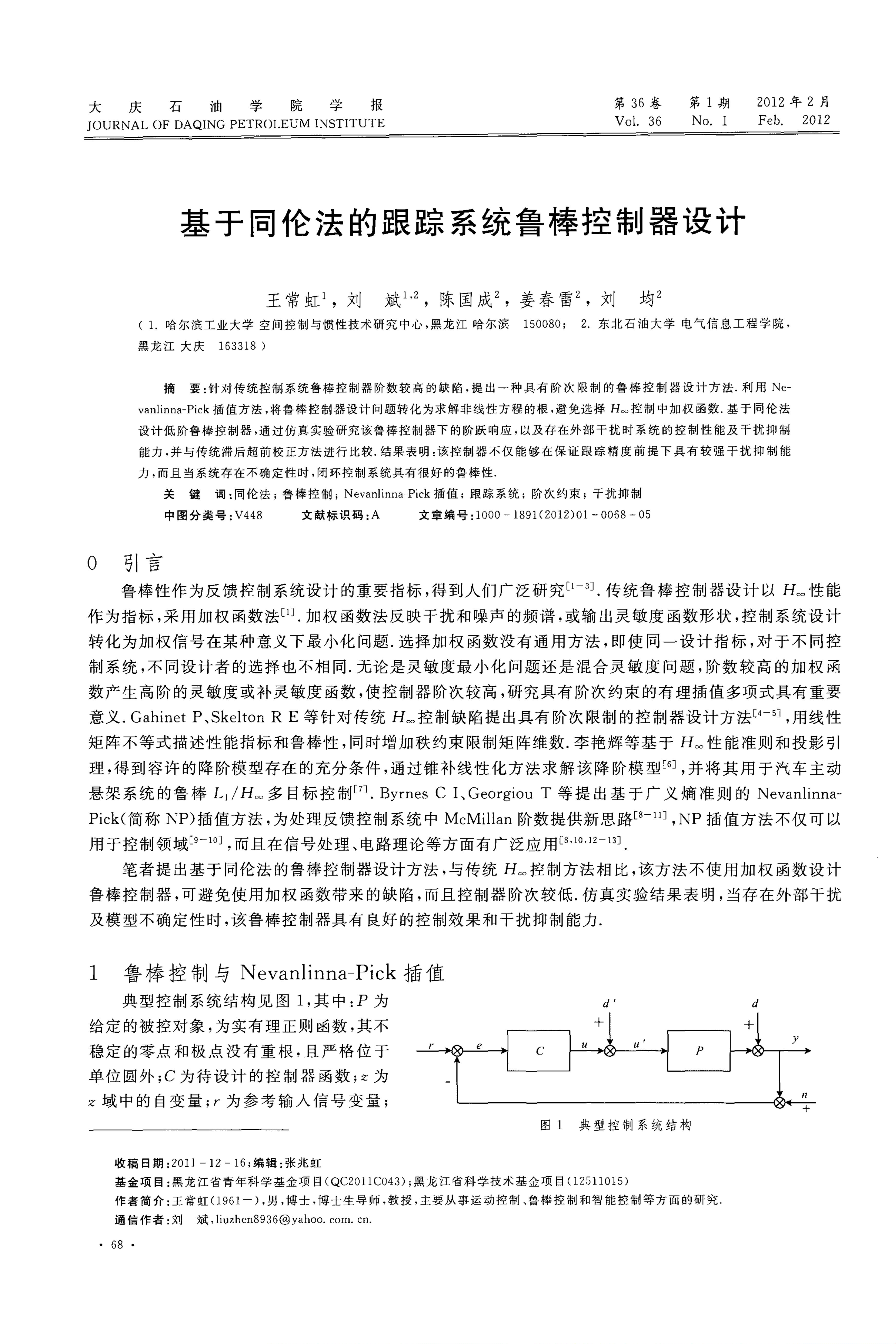
典型控制系统结构见图1,其中
:P
为
给定的被控对象,为实有理正则函数,其不
稳定的零点和极点没有重根,且严格位于
单位圆外
;C
为待设计的控制器函数
ρ 为
z
域中的自变量
;
r
为参考输入信号变量;
收稿日期:
2011 - 12 -
16
;编辑:张兆虹
r e
d'
+
C
u
u'
图
1
典型控制系统结构
基金项目:黑龙江省青年科学基金项目
(QC2011C043)
;黑龙江省科学技术基金项目(1
2511015)
P
1
1'者简介:王常虹
0961
一)
,男,博士,博士生导师,教授,主要从事运动控制、鲁棒控制和智能控制等方面的研究.
通信作者:
:x!J
斌,
liuzhen8936@
yahoo. com. cn.
• 68 •
d
+
y
11
+
下载后可阅读完整内容,剩余5页未读,立即下载
2022-03-13 上传
2021-08-28 上传
2021-05-12 上传
2021-05-13 上传
点击了解资源详情
点击了解资源详情
2021-05-09 上传
2021-05-22 上传
2019-08-13 上传

weixin_38665822
- 粉丝: 9
- 资源: 933
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
