STM32驱动舵机:AX-18A详解与延时函数
需积分: 9 46 浏览量
更新于2024-08-04
1
收藏 172KB DOCX 举报
"STM32驱动程序 文档介绍 - 嵌入式开发"
本文档主要介绍了如何在STM32微控制器上驱动AX-18A舵机,包括舵机的基本介绍、驱动原理以及两种驱动方法的实现:延时函数驱动和PWM波驱动。
舵机介绍
AX-18A是一款常用的舵机,它具有特定的数据参数和性能特征。其外观如图1所示。舵机的工作基于一个20毫秒的周期性脉冲,其中高电平部分(角度控制脉冲)的宽度在0.5毫秒到2.5毫秒之间,决定了舵机转动的角度。舵机的转动范围是300度,对应的时间宽度与角度的关系如下:
- 0.5ms —— 0度
- 1.0ms —— 75度
- 1.5ms —— 150度
- 2.0ms —— 225度
- 2.5ms —— 300度
舵机具有追随特性,意味着在CPU发送新的控制信号后,舵机会全速从当前位置转向目标位置,这个过程需要一定时间。理想情况下,控制信号的高电平持续时间(Tw)应等于或略大于达到目标位置所需的时间(△T),以确保连贯且快速的转动。
舵机驱动原理
舵机的转动与控制线上的高电平持续时间直接相关,每增加0.5毫秒,舵机会转动一定的角度。通过精确控制这个时间,可以实现舵机的精细定位。
驱动程序分析
5.2.1 延时函数驱动
延时函数驱动是一种简单的方法,通过设置微控制器的IO口输出不同宽度的高电平来控制舵机转动。以下是一个简单的延时函数驱动示例:
```c
#include "AX-18A.h"
void AX_18A_Init(void) // 接口初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = SE_OUT;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(SE_PORT, &GPIO_InitStructure);
GPIO_WriteBit(SE_PORT, SE_OUT, (BitAction)0); // 初始化为低电平
}
```
在这个例子中,首先初始化了GPIO端口,然后通过写入Bit来控制舵机的输出。
5.2.2 PWM波驱动
另一种驱动方式是使用PWM(脉宽调制)波,这种方式能更精确地控制舵机的角度,因为PWM波的占空比可以直接映射到角度。在STM32中,可以通过定时器配置来生成PWM波,通过调整定时器的预分配值和比较寄存器值来改变PWM波的高电平时间,从而控制舵机转动。
STM32驱动AX-18A舵机需要理解舵机的工作原理,并根据其特性编写相应的驱动程序。无论是延时函数驱动还是PWM波驱动,都需确保脉冲宽度的精确控制,以实现舵机的准确转动。在实际应用中,可以根据项目需求和性能要求选择适合的驱动方式。
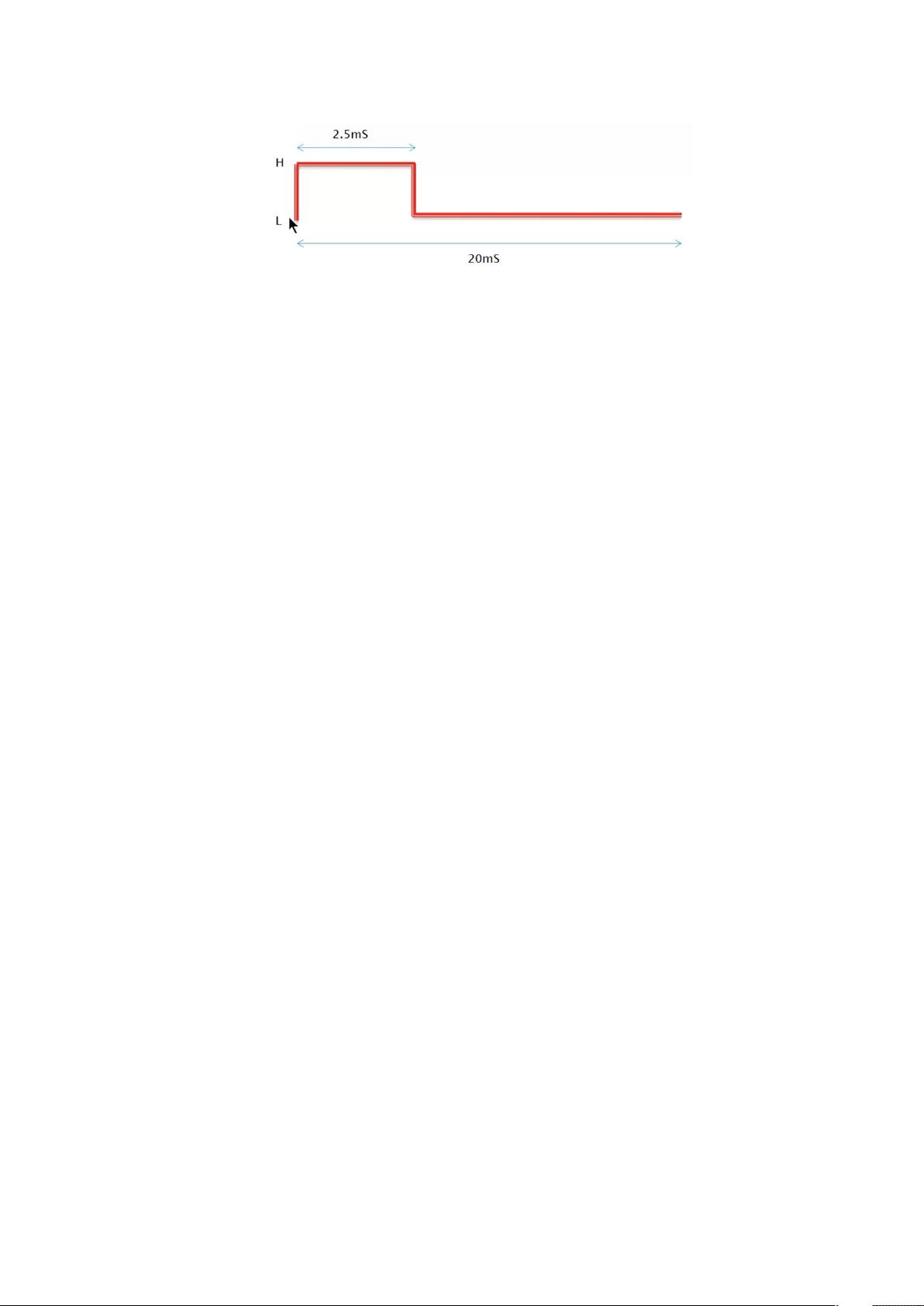
图 2 波形图
5.2 驱动程序分析
对于驱动来说,我们可以选择延时函数驱动也可以选择 PWM 波驱动,接下
来我将采用两种方式实现功能。
5.2.1 延时函数驱动
#include "AX-18A.h"
void AX_18A_Init(void) //接口初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = SE_OUT;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(SE_PORT, &GPIO_InitStructure);
GPIO_WriteBit(SE_PORT,SE_OUT,(BitAction)(0));
}
void AX_18A_angle(u8 a){ //舵机角度控制设置(参数值 0~300)对应角度 0~300 度
u8 b=error;//角度校正偏移量,该值为误差修正值可以随时替换
GPIO_WriteBit(SE_PORT,SE_OUT,(BitAction)(1)); //接口输出高电平 1
delay_us(500+a*6+b); //延时
GPIO_WriteBit(SE_PORT,SE_OUT,(BitAction)(0)); //接口输出低电平 0
delay_us(19500-a*6-b); //延时
}
首先进行初始化,设定波形输出端口,在 AX_18.h 中我设定的是 GPIOA,端口
为 11,以及输出模式和速度等设置。然后设置初始值为 0。接下来时利用延时函
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-06 上传
2011-10-04 上传
2020-07-17 上传
2018-10-17 上传

一碗黄豆酱
- 粉丝: 3w+
- 资源: 26
 我的内容管理
展开
我的内容管理
展开







最新资源
- cst251:CST-251的类仓库
- httpdmon:Apache实时日志文件监视器
- 基于 网络爬虫 和 数据可视化 等技术实现的 优质电影数据分析 平台(Python).zip
- 大功率DCDC升压电源与DCAC逆变器电路原理图与PCB图设计
- curso-java:Meus primeiros passos na liguagem
- smart_surveillance
- MADVLSI-MP4
- dltmatlab代码-simulator-multiHop-wireless:具有移动终端的多跳无线网络的可用性性能
- MonoGameBook:MonoGame的代码示例可在GameFromScratch.com上免费获得
- BerthouYannis_3_12022021:Ohmyfood
- 行业文档-设计装置-一种利用导热油作为介质的储热式太阳能热水器.zip
- test_freelance
- Fire框架是由中通大数据自主研发并开源的、专门用于进行Spark和Flink任务开发的大数据框架,可节约70%以上.zip
- PBv2-PostFixes:PlayBox v2的后期修正,调整等
- dltmatlab代码-cvtoolbox:一些用于图像处理的实用程序代码
- austin-bootstrap-practice
