无线水下机器人协作定位与环境建图
33 浏览量
更新于2024-07-15
收藏 1.67MB PDF 举报
本文探讨了在水下环境中,无线连接的机器人鱼(Underwater Robotic Fish, URF)的自主定位与环境建模技术。研究者提出了一个结合了合作定位粒子滤波(Cooperative Localization Particle Filter, CLPF)和占用网格地图算法(Occupancy Grid Mapping Algorithm, OGMA)的创新方法。CLPF利用概率框架,显著的优势在于无需依赖URF的先验动态模型,即可实现精确的三维定位。与传统方法相比,即使在移动信标数量少于四个(通常这是某些算法所需的最小数量)的情况下,CLPF也能提供良好的性能。
CLPF基于分布式传感器网络的无线通信能力,通过收集和融合来自周围环境的多源信息,进行位置估计。这种方法尤其适用于无线机器人,如URF,它们在水下环境中可能面临复杂的通信环境和不确定性的运动模型。通过概率密度函数更新,CLPF能够有效地处理噪声和不确定性,提高定位精度。
当CLPF的定位结果被输入到OGMA中时,可以构建出环境地图,该地图能清晰地展示出水下的障碍物分布、空闲区域和其他重要特征,这对于规划路径、避障以及环境理解至关重要。通过大量的模拟实验,作者评估了所提出的算法的性能,包括定位精度、鲁棒性以及在不同水下条件下的适应性。
这个研究对于推进水下无人探索任务的自主性和效率具有重要意义,因为它能够在资源有限且环境复杂的水下世界中,实现高精度的机器人定位和环境理解,为海洋科学考察、水下搜索与救援以及智能海洋设备的应用开辟新途径。同时,它也展示了无线机器人技术在复杂环境中的潜力,为未来的机器人研究提供了有价值的经验和技术支持。
Underwater Localization and Environment Mapping using Wireless Robots 5
Mobile Beacons
Robotic Fishes
Trajectories
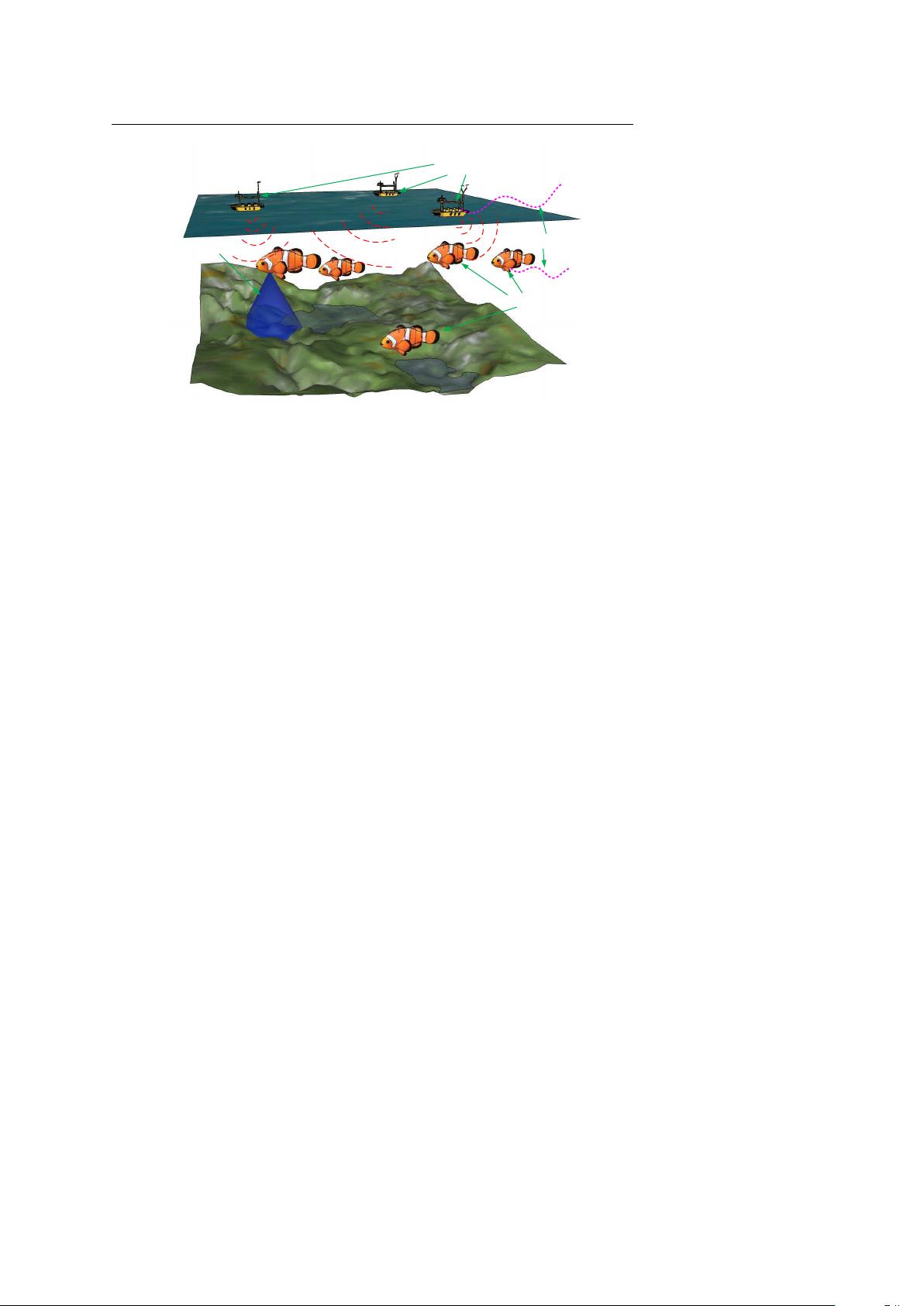
Working Sonar
Fig. 2 Underwater localization and mapping system using a school of robotic fish.
the measured distances to the SMBs and the depth from the small, light and
cheap pressure sensor to estimate its current location and then construct the
environment map.
The swarm robotic fish moves as a group in the ocean, and encounters
various disturbances. Their measured distance and depth data are assumed to
have the additive Gaussian noises N(µ
d
, σ
2
d
) and N(µ
h
, σ
2
h
) respectively. The
reason for setting σ
d
to be constant is that the error of the underwater range
measurement is shown to be almost range-independent by many experiments
and it can be modeled as a Gaussian distribution with fixed variance[3]. Be-
cause the acoustic signal can propagate much farther under the water than in
the air, the maximum communication range of the surface robot is assumed
to be very long.
Due to the influence of the ocean current, the complexity of Computational
Fluid Dynamics and the various constraints on the robotic fish, it is impossible
to determine its kinematic model accurately. Robotic fish has no the odometry
information which is heavily used on localization and navigation of the ground
robots. Therefore, we assume that only the maximum moving velocity v
max
of
the robotic fish is known. This is quite different from the approach proposed
in [9] where prior knowledge such as the specific dead-reckoning model, veloc-
ity, heading and depth were deployed. By considering the speed of the ocean
current as part of speed of robotic fish, this maximum speed v
max
can be used
to mitigate the displacement influence caused by the ocean current.
The proposed method is based on the particle filter (PF). As opposed to
Extended Kalman Filter (EKF) which has to linearize the non-linear models,
PF is applicable for the non-gaussian stochastic processes with non-linear dy-
namics and the posterior distribution p(x
k
|z
1:k
) whose form is non-parametric.
z
1:k
is the set of measurements received from time 1 up to time k. The key idea
of PF is to represent the posterior distribution p(x
k
|z
1:k
) by a set of particles
剩余23页未读,继续阅读
2021-06-19 上传
2020-06-01 上传
2021-01-27 上传
2021-02-21 上传
2021-09-11 上传
2021-01-26 上传
2020-01-10 上传
2021-01-26 上传

weixin_38740848
- 粉丝: 6
- 资源: 888
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
