飞思卡尔智能车速度控制策略:PID+鲁棒与弯道优化
需积分: 50 45 浏览量
更新于2024-07-18
5
收藏 2.71MB PDF 举报
飞思卡尔算法在智能汽车软件设计中的应用尤其体现在电机控制部分,针对大惯性系统的车体速度控制,采用了PID(比例积分微分)和鲁棒控制相结合的方法。PID控制器是一种经典的反馈控制策略,其公式中包括积分项、比例项和微分项,用于快速响应和消除误差。由于车体速度作为大惯性对象,积分作用可能不太重要,所以简化为PD控制,即只考虑比例和微分两部分。
在速度控制回路中,设定值通常是基于实践经验确定的,考虑到速度控制通道的时间滞后较小,这有助于提高控制精度。"棒棒控制"可能是对PID控制的一种优化,它可能涉及到更复杂的控制策略,通过在加减速过程中动态调整控制参数,以实现快速、平滑的过渡,减少动态过程中的冲击。
当模型车进入弯道时,速度控制尤为重要。为了保证稳定性,会采取减速控制,将速度设定值降低至低速挡,确保车辆安全通过弯道。同时,为了减小模型车在弯道上的摆动,速度控制策略与偏差成线性关系,即速度设定值随偏差增大而递减。公式1-2描述了这种线性关系,其中`s_v(k)`代表速度闭环设定值,`v`是模型车全程运动的平均速度设定值,`e(k)`则是当前的偏差。
鲁棒控制则强调在存在不确定性或干扰的情况下,仍能保证系统性能的控制策略。当误差超过预设阈值时,系统会采用更大的输出来迅速纠正,确保车速稳定在预定范围内。这种控制思想对于智能汽车在复杂环境下的性能至关重要,直接影响到比赛成绩。
飞思卡尔算法在智能汽车电机控制中的应用涉及PID和鲁棒控制的协同工作,以及针对不同路况(如弯道)的动态速度调整策略,确保车辆能在比赛中高效、稳定地运行。
第五章 智能汽车软件设计
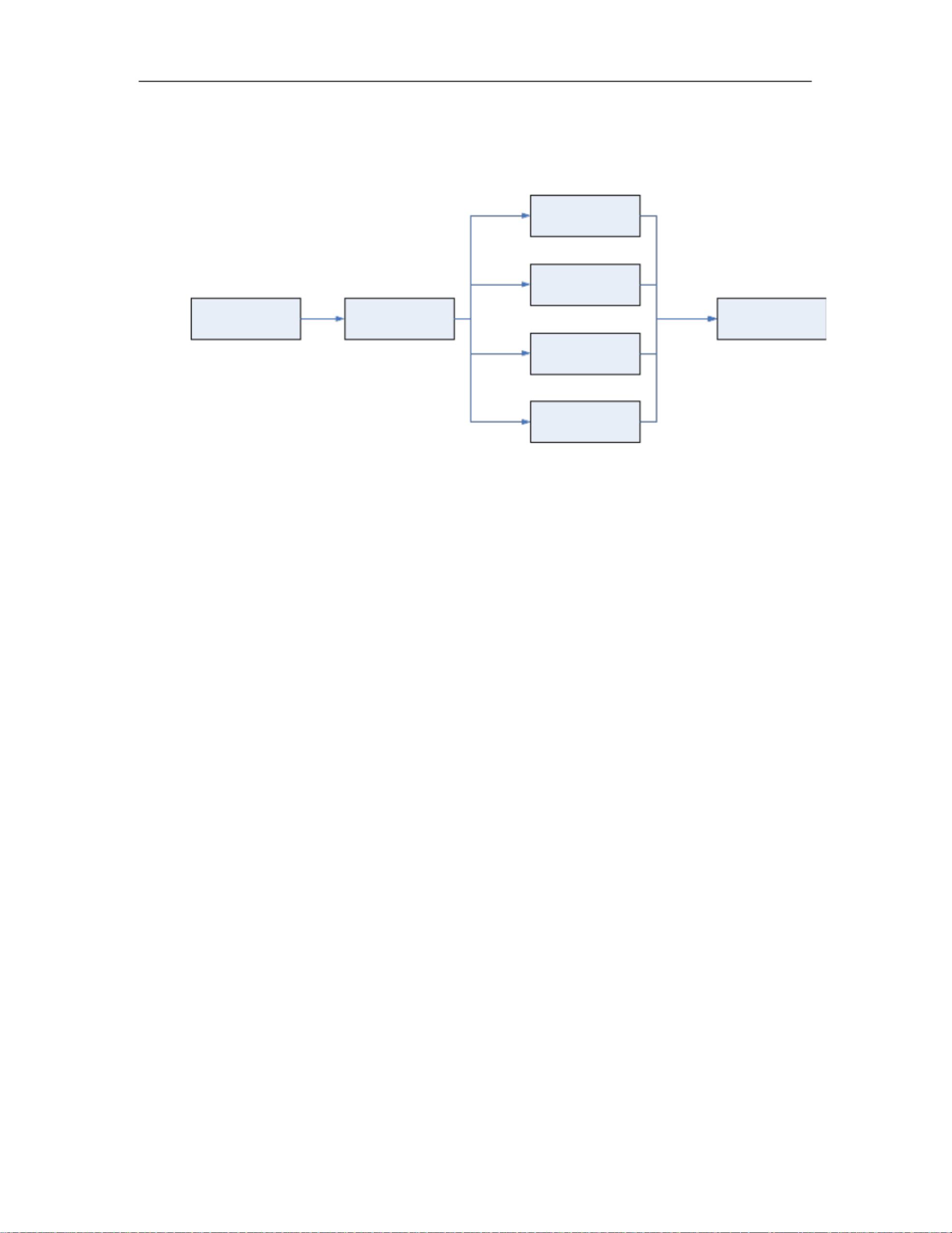
由于摄像头看得较远,每幅图像反映的赛道信息量较大,我们需要针对赛车在
不同位置,对其有侧重的采用。具体就是将采到的 15行划分为几个区域,针对不同
路况对每个区域赋以不同的权值。其原理图如图:
参数建表 路径判别
直道对应
参数及算法
弯道对应参
数及算法
小 S 道对应
参数及算法
大 S 对应参数
及算法
舵机打角
直道
弯道
小 S
大 S
图5.10 路径规划示意图
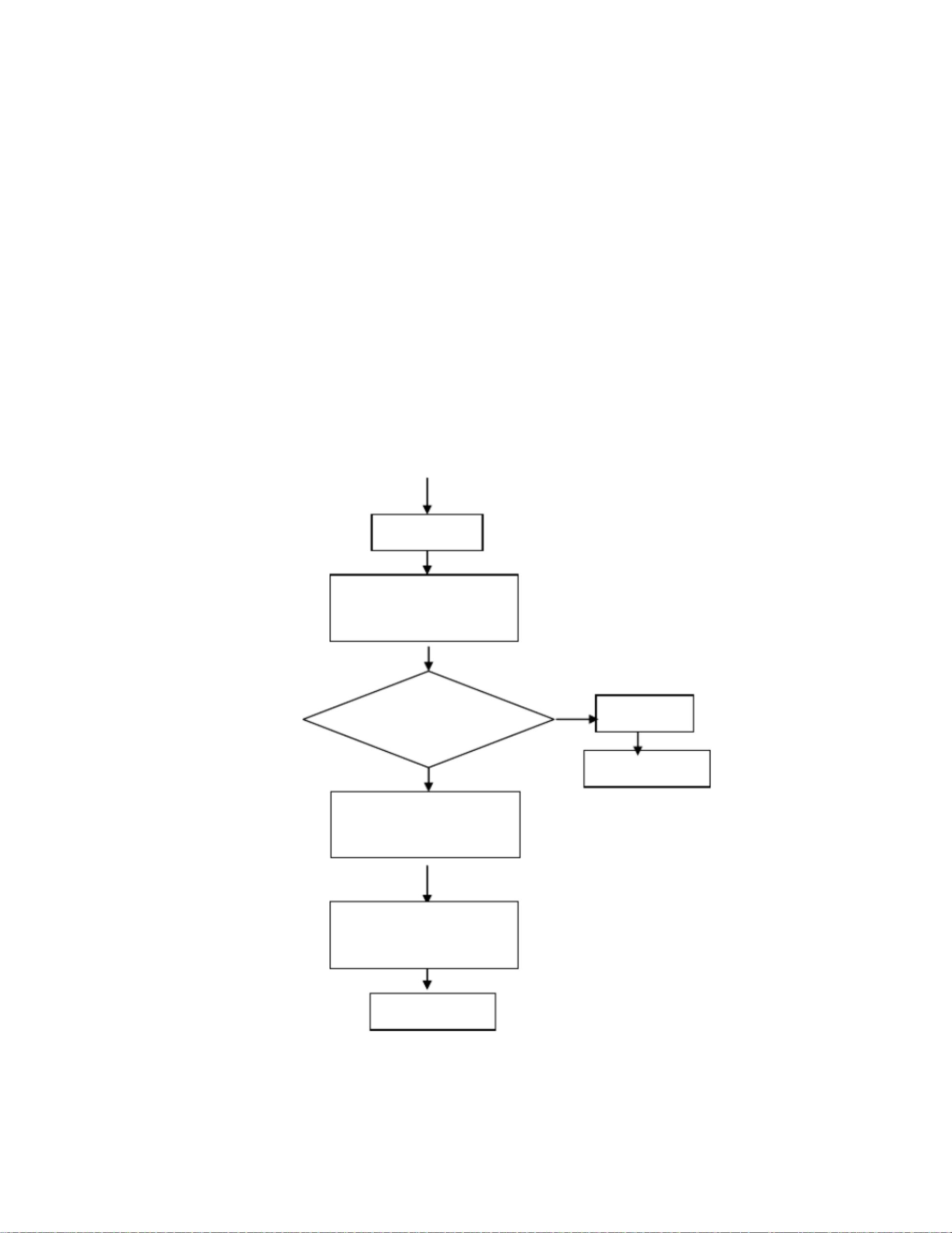
1.7. 偏航距离的计算
由于已经获得了赛道中心线的位置, 所以计算偏航距离的问题是选取何处的中
心线的距离为当前的偏航距离。控制算法的执行周期为 40ms,如果赛车的速度为
2m/s,则在两次控制算法的执行中间,赛车要前进 8cm,赛车所处的环境将发生比
较大的改变,所以赛车的控制只能算是半实时控制,这是所有使用摄像头作为主要
寻线传感器的参赛队都避免不了的问题。因为算法的滞后性,赛车需要将“当前位
置”进行适当前移。前移量应该跟赛车当前速度成正比,但实际中我们发现,适当

剩余68页未读,继续阅读
629 浏览量
276 浏览量
162 浏览量
157 浏览量
162 浏览量
2024-04-15 上传

weixin_42126339
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现ART与SART算法在医学CT重建中的应用
- S2SH整合版:快速搭建Struts2+Spring+Hibernate开发环境
- 托奇卡项目团队成员介绍
- 提升外链发布效率的SEO推广神器——搜易达网络推广大师v2.035
- C#打造简易记事本应用详细教程
- 探索虚拟现实地图VR的奥秘
- iOS模拟器屏幕截图新工具
- 深入解析JavaScript在生活应用开发中的运用
- STM32F10x函数库3.5中文版详解与应用
- 猎豹浏览器v6.0.114.13396 r1:安全防护与网购敢赔
- 掌握JS for循环输出的最简洁代码技巧
- Java入门教程:TranslationFileGenerator快速指南
- OpenDDS3.9源码解析及最新文档指南
- JavaScript提示框插件:鼠标滑过显示文章摘要
- MaskRCNN气球数据集:优质图像识别资源
- Laravel日志查看器:实现Apache多站点日志统一管理
