OpenCV实战:Canny边缘检测原理与步骤详解
版权申诉
OpenCV是一种广泛应用于计算机视觉和机器学习领域的开源库,它提供了一系列强大的图像处理工具,包括Canny边缘检测算法。Canny边缘检测是一种经典的图像边缘检测方法,其目标是找到图像中亮度变化显著的边界,这对于图像分析、识别、分割等任务至关重要。
在实验二中,主要目标是使用OpenCV在VC++6.0环境中实践Canny边缘检测。首先,参与者需要熟悉OpenCV的安装和配置,这是基础步骤,确保后续算法的正确执行。实验着重于理解Canny算法的工作原理,包括:
1. 原理概述:Canny边缘检测基于两个关键步骤:平滑(使用高斯滤波器去除噪声)和边缘检测(计算图像的梯度)。算法的核心在于寻找局部最大梯度值的像素点,这些点代表图像中的显著变化,即边缘。
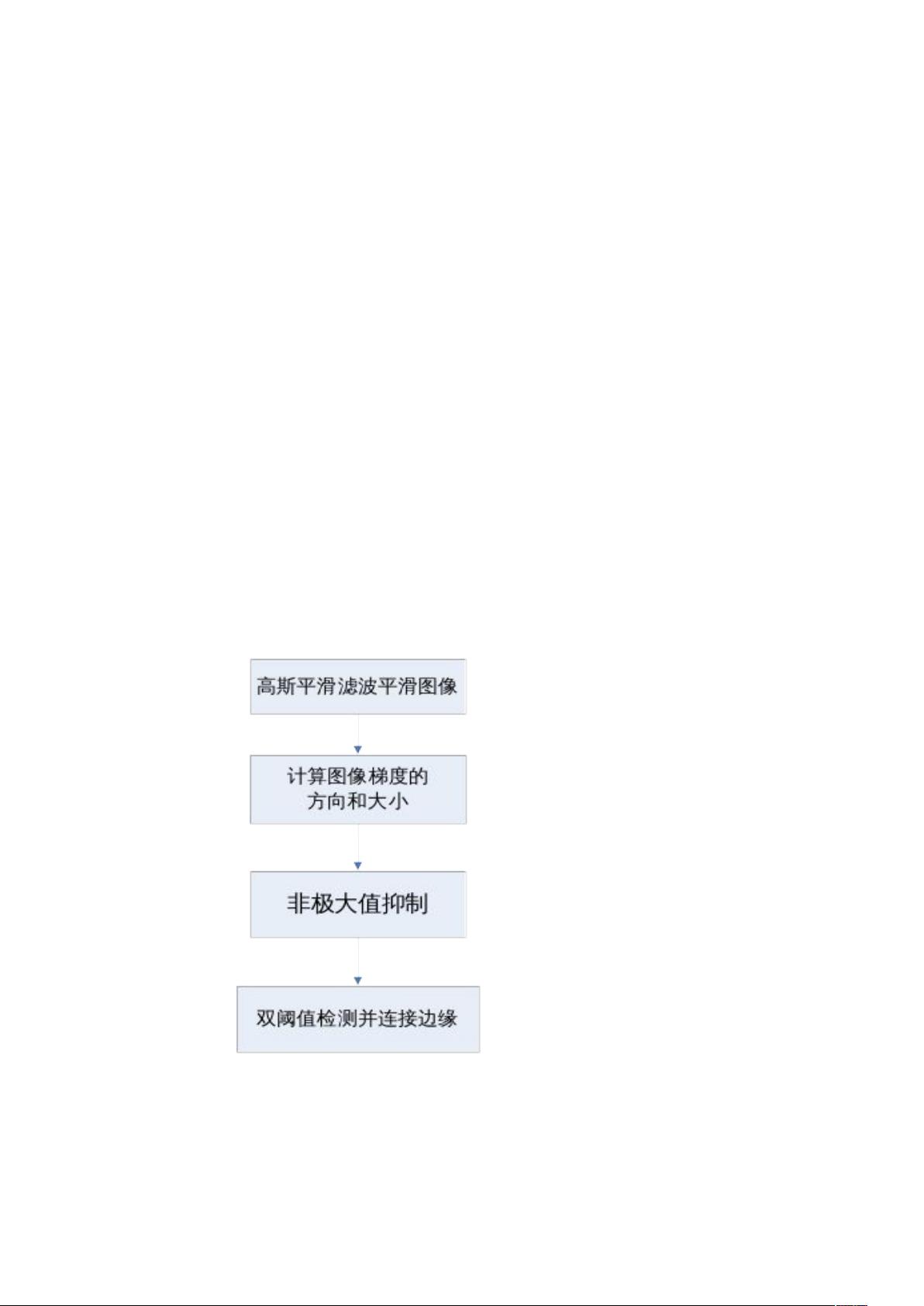
2. 边缘检测步骤:
- 高斯平滑:利用高斯滤波器降低图像噪声,提高边缘检测的精度。
- 梯度计算:通过对图像进行一阶导数运算,获得梯度幅值图像,表示亮度变化的强度。
- 双阈值检测:通过设定低阈值和高阈值,将梯度值分为强边缘和弱边缘,强边缘进一步细化。
- 非极大值抑制(NMS):剔除梯度线上非最大值的像素,仅保留峰值,形成细化的边缘。这是通过3x3邻域比较中心像素值与梯度方向上的邻居值来实现的。
3. 非极大值抑制公式:公式展示了如何根据邻域内的像素值比较,细化边缘位置,确保只有最高点保留下来,其余为零。
通过这个实验,学习者不仅掌握了Canny边缘检测的具体操作,还理解了如何在实际项目中应用这一技术来增强图像处理的质量和效率。Canny算法的优点在于既能有效抑制噪声,又能精确地定位边缘,因此在很多领域如物体识别、图像分割、图像压缩等方面都得到了广泛应用。
实验二 OpenCv 实现 Canny 边缘检测
一、实验目的
1、 了解如何在 VC++6.0 上安装与配置 opencv
2、 了解 canny 边缘检测的原理与 opencv 的实现
二、实验引言
边缘是一幅图像最重要的特征之一,图像边缘部分集中了图像的大部分信息。因此,
边缘的确定对于图像场景的识别与理解非常重要;同时在图像分割中也有重要应用。可以
利用边缘对图像进行区域分析。边缘在图像体现为局部区域亮度的显著变化,可见这种变
化是为灰度面的阶跃。有很多种方法可以用来对图像边缘进行检测。本实验中采用 Canny
边缘检测。
三、实验原理
检测阶跃边缘的基本思想是在图像中找出具有局部最大梯度值的像素点,其大部分的
工作集中在寻找能够用于实际图像的梯度数字逼近。
图像梯度逼近必须满足要求:
1、逼近必须能够抑制噪声效应
2、必须尽量精确的确定边缘的位置
Canny 检测的基本过程
平滑与计算
Canny 边缘检测器就是高斯函数的一阶导数,是对信噪比与定位之间最优化的逼近算
子。高斯平滑和梯度逼近结合的算子不是旋转对称的。 高斯平滑和梯度逼近结合的算子不
是旋转对称的。
下载后可阅读完整内容,剩余5页未读,立即下载
2019-04-06 上传
2019-01-22 上传
2008-09-24 上传
2021-11-28 上传
2023-04-12 上传
2014-04-09 上传
点击了解资源详情
点击了解资源详情

Aamboo
- 粉丝: 19
- 资源: 560
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
