AD5820 VCM驱动芯片技术规格与应用
"AD5820是一款VCM(Voice Coil Motor)驱动芯片,适用于摄像头开发。该芯片具有100mA的电流下沉能力,支持10位I2C兼容的串行接口,并采用2x3阵列或3x3mm的封装。其特色包括内置电流感应电阻、可选的输出摆率控制、2.3V至5.5V的工作电源范围、10位分辨率的DAC、集成的低噪声前置放大器以及电源下降至0.5μA的低功耗模式。"
AD5820是Analog Devices公司推出的一款针对嵌入式系统的VCM驱动芯片,特别适合于摄像头模组的开发。这款芯片的主要特点和功能如下:
1. **电流下沉能力**:AD5820能够提供100mA的电流下沉,这使得它能够有效地驱动VCM,使其在摄像头的对焦机制中发挥关键作用。
2. **10-bit I2C DAC**:芯片内置一个10位分辨率的数字模拟转换器(DAC),通过2线I2C兼容的串行接口进行通信,允许精确地设置电流输出,以实现高精度的VCM位置控制。
3. **封装选项**:AD5820提供两种封装选择,一种是2x3的阵列封装,尺寸为1mm x 1.5mm的WLCSP(无引脚芯片级封装),另一种是3x3mm的LFCSP(低引脚数芯片级封装),这些小尺寸封装适合在空间有限的嵌入式系统中使用。
4. **输出摆率控制**:用户可以通过配置选择不同的输出摆率,以适应不同响应速度的需求。
5. **电源范围**:芯片可以在2.3V到5.5V的电源电压范围内工作,这使得它能够适应多种电源环境。
6. **内置电流感应电阻**:集成的电流感应电阻允许实时监测和控制输出电流,确保VCM驱动的准确性和稳定性。
7. **保证的单调性**:在整个编码器范围内,AD5820保证了单调性,这意味着输出电流会随着输入数字信号的增加而线性增加,不会出现跳跃或不连续的现象。
8. **低功耗模式**:在待机或电源下降模式下,芯片的电流消耗可低至0.5μA,这有助于延长设备的电池寿命。
9. **内部参考**:内置的参考电压源确保了输出电流的稳定性和精度。
10. **低噪声前置放大器**:集成的超低噪声前置放大器提高了信号质量,降低了噪声干扰,从而提高摄像头的成像性能。
AD5820 VCM驱动芯片以其紧凑的封装、高精度的电流控制和低功耗特性,成为嵌入式摄像头系统设计中的理想选择。结合其I2C接口和丰富的功能集,使得它易于集成到各种硬件平台中,实现高效、可靠的VCM驱动。
AD5820 ADI CONFIDENTIAL Preliminary Technical Data
Rev. Pr A10 | Page 4 of 19
AC SPECIFICATIONS
V
DD
= 2.3 V to 5.5 V, AGND = DGND = 0 V, load resistance R
L
= 25 Ω connected to V
DD
, unless otherwise noted.
Table 2.
B Version
1, 2
Parameter Min Typ Max Unit Test Conditions/Comments
Output Current Settling Time 250 µs V
DD
= 5.5 V, R
L
= 25 Ω, L
L
= 680 µH, ¼ scale to ¾ scale change (0x100 to 0x300)
Slew Rate 0 0.3 mA/µs
Slew Rate 1 TBD
Slew Rate 2 TBD
Slew Rate 3 TBD
Major Code Change Glitch Impulse 0.15 nA-s 1 LSB change around major carry
Digital Feedthrough
3
0.06 nA-s
1
Temperature range is: B Version: −40°C to +85°C for LFCSP package and −30°C to +85°C for WLCSP package.
2
Guaranteed by design and characterization; not production tested.
3
See the Terminology section.
TIMING SPECIFICATIONS
V
DD
= 2.3 V to 5.5 V. All specifications T
MIN
to T
MAX
, unless otherwise noted.
Table 3.
B Version
Parameter
1
Limit at T
MIN
, T
MAX
Unit Description
f
SCL
400 kHz max SCL clock frequency
t
1
2.5 µs min SCL cycle time
t
2
0.6 µs min t
HIGH
, SCL high time
t
3
1.3 µs min t
LOW
, SCL low time
t
4
0.6 µs min t
HD, STA
, start/repeated start condition hold time
t
5
100 ns min t
SU, DAT
, data setup time
t
6
2
0.9 µs max t
HD, DAT
, data hold time
0 µs min
t
7
0.6 µs min t
SU, STA
, setup time for repeated start
t
8
0.6 µs min t
SU, STO
, stop condition setup time
t
9
1.3 µs min t
BUF
, bus free time between a stop condition and a start condition
t
10
300 ns max t
R,
rise time of both SCL and SDA when receiving
0 ns min May be CMOS driven
t
11
250 ns max t
F
, fall time of SDA when receiving
300 ns max t
F
, fall time of both SCL and SDA when transmitting
20 + 0.1 C
b
3
ns min
C
b
400 pF max Capacitive load for each bus line
1
Guaranteed by design and characterization; not production tested.
2
A master device must provide a hold time of at least 300 ns for the SDA signal (referred to the VIH MIN of the SCL signal) to bridge the undefined region of SCL’s falling
edge.
3
C
b
is the total capacitance of one bus line in pF. t
R
and t
F
are measured between 0.3 V
DD
and 0.7 V
DD.
05950-002
S
DA
t
9
SCL
t
3
t
10
t
11
t
4
t
4
t
6
t
2
t
5
t
7
t
1
t
8
START
CONDITION
REPEATED
START
CONDITION
STOP
CONDITION
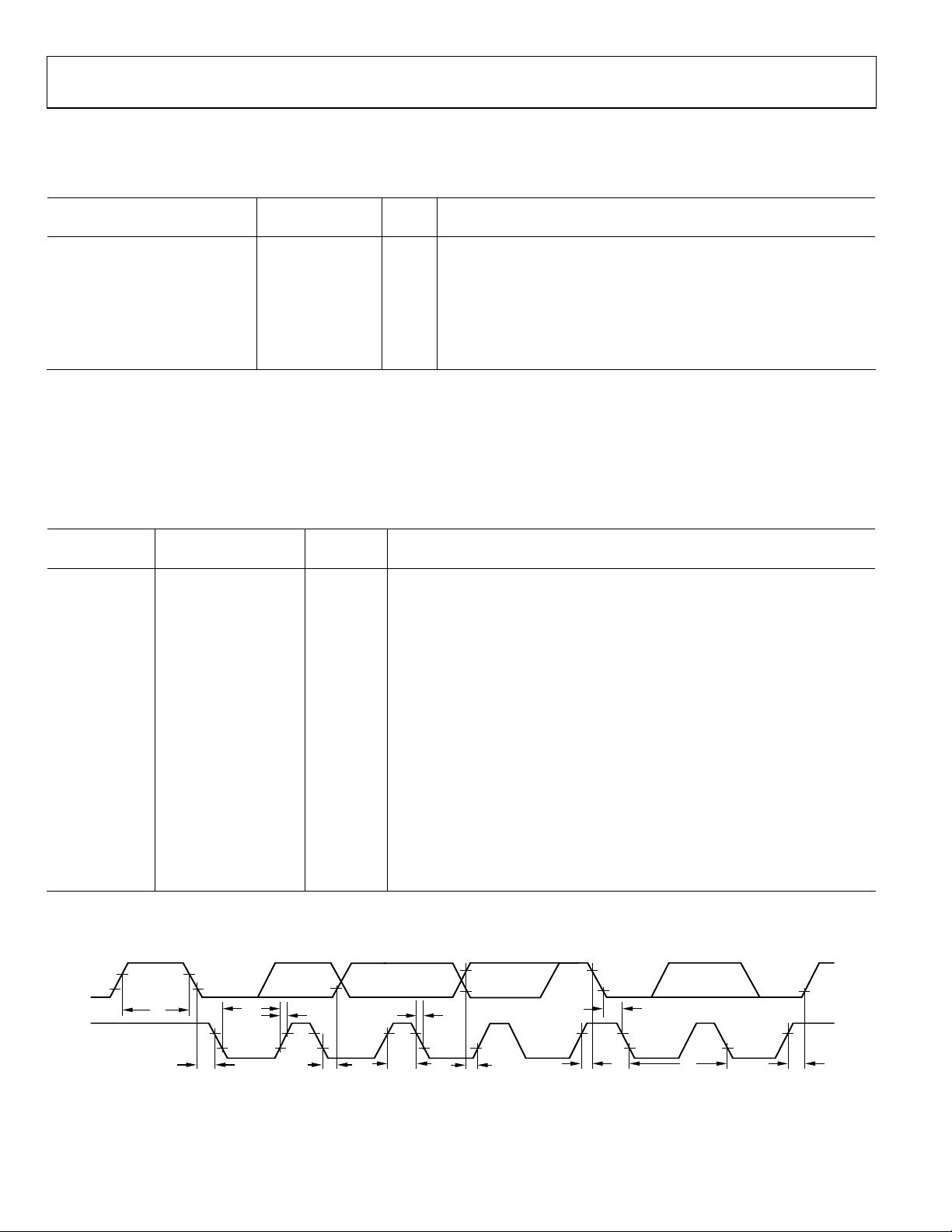
Figure 2. 2-Wire Serial Interface Timing Diagram
剩余18页未读,继续阅读
2016-08-16 上传
2016-11-14 上传
2023-11-30 上传
2023-10-19 上传
2017-01-23 上传
2014-05-18 上传
160 浏览量
2021-10-03 上传

天才2012
- 粉丝: 1069
- 资源: 41
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
