PIXHAWK 2.4.8飞控板原理图详解
本文档是关于Pixhawk 2.4.8飞控系统的原理图,由YourCompany公司绘制,修订版本为1.0,发布日期为2020年2月20日。Pixhawk 2.4.8是一款专为无人机设计的高性能飞控板,它集成了多种传感器接口、通信模块以及电源管理功能,旨在实现精确的飞行控制。
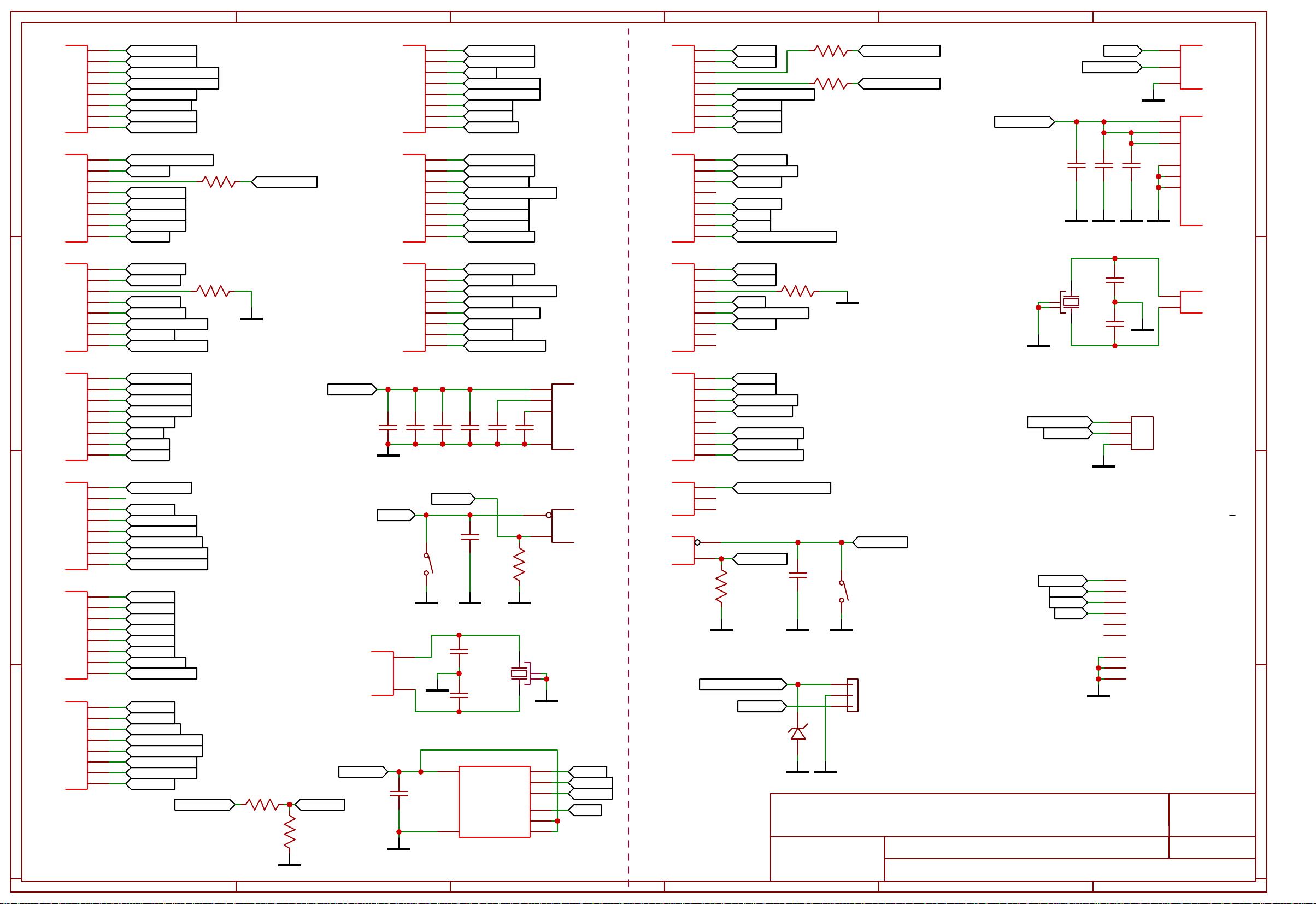
该原理图展示了飞控板上各信号线的布局和连接,包括但不限于:
1. **PA**系列引脚:这些引脚用于连接外部设备,如PA0至PA15,它们可能是数字输入/输出(GPIO)接口,用于控制电机、舵机和其他硬件设备。
2. **U101PORT**:这是一个多功能接口,包含UART(串行通信)、SPI(同步串行接口)、模拟输入(如电池电压和电流传感器)等。例如,U101PORTA_I与FMU-UART4相关的引脚用于飞控与外部通信单元之间的数据传输。
3. **FMU**:飞控模块(Flight Management Unit)接口,用于处理各种传感器的数据,如陀螺仪(GYRO)、磁力计(MAG)、加速度计(ACCEL)等,以及与外部设备的通信接口(如SWDIO/SWCLK)。
4. **CAN2**:Controller Area Network(控制器局域网)接口,用于飞控系统内部以及与其他设备之间的高速通信,如CAN2_TX和CAN2_RX。
5. **I2C**:Inter-Integrated Circuit(I2C)接口,用于连接多个I2C设备,如压力传感器、模拟输入通道等。
6. **FRAM**:Fast Read/Write Memory(闪存),可能用于存储数据或者执行快速计算任务。
7. **GPIO**:通用输入输出引脚,如PB0至PB15,用于扩展外部设备的控制,如警报灯、中断信号等。
8. **ADC**(Analog-to-Digital Converter):模拟信号转数字信号转换器,如SpareADC,用于处理来自传感器的模拟信号并转换为数字形式。
9. **MPU**:可能指的是微处理器,MPU_CS引脚用于控制微处理器的片选信号。
10. **SERIAL**:串行通信接口,用于飞控板内部通信和外部数据交换,如SERIAL_FMU_TO_IO和SERIAL_IO_TO_FMU。
这份Pixhawk 2.4.8飞控原理图详细描绘了飞控系统的核心组件及其连接方式,是理解该飞控系统工作原理和进行硬件设计或维护的重要参考资料。通过深入研究这些引脚的功能和布局,开发人员可以更好地优化飞行控制系统,确保无人机的稳定性和可靠性。
A A
B B
C C
D D
1
1
2
2
3
3
4
4
5
5
TITLE:
pix2.4.8
REV: 1.0
Date:
2020-02-20
Sheet:
1/1
Drawn By:
Company:
Your Company
PA0
23
PA1
24
PA2
25
PA3
26
PA4
29
PA5
30
PA6
31
PA7
32
U101PORTA_I
FMU-UART4_TX
FMU-UART4_RX
BATT_VOLTAGE_SENS
BATT_CURRENT_SENS
VDD_5V_SENS
SPI_INT_SCK
SPI_INT_MISO
SPI_INT_MOSI
PA8
67
PA9
68
PA10
69
PA11
70
PA12
71
PA13
72
PA14
76
PA15
77
U101PORTA_H
VDD_5V_PERIPH_EN
VBUS
470R
R101
IO-USART1_TX
OTG_FS_DM
OTG_FS_DP
FMU-SWDIO
FMU-SWCLK
ALARM
PB0
35
PB1
36
PB2
37
PB3
89
PB4
90
PB5
91
PB6
92
PB7
93
U101PORTB_L
GYRO_DRDY
MAG_DRDY
FMU-SWO
ACCEL_DRDY
VDD_BRICK_VALID
CAN2_TX
10K
R102
GND
VDD_SERVO_VALID
PB8
95
PB9
96
PB10
47
PB11
48
PB12
51
PB13
52
PB14
53
PB15
54
U101PORTB_H
FMU-I2C1_SCL
FMU-I2C1_SDA
FMU-I2C2_SCL
FMU-I2C2_SDA
CAN2_RX
FRAM_SCK
FRAM_MISO
FRAM_MOSI
PC0
15
PC1
16
PC2
17
PC3
18
PC4
33
PC5
34
PC6
63
PC7
64
U101PORTC_I
VBUS_VALID
Spare ADC
MPU_CS
FMU_AUX_ADC1
FMU_AUX_ADC2
PRESSURE_SENS
SERIAL_FMU_TO_IO
SERIAL_IO_TO_FMU
PC8
65
PC9
66
PC10
78
PC11
79
PC12
80
PC13
7
PC14
8
PC15
9
U101PORTC_H
SDIO_D0
SDIO_D1
SDIO_D2
SDIO_D3
SDIO_CK
GYRO_CS
GPIO_EXT_1
ACCEL_MAG_CS
PD0
81
PD1
82
PD2
83
PD3
84
PD4
85
PD5
86
PD6
87
PD7
88
U101PORTD_L
CAN1_RX
CAN1_TX
SDIO_CMD
FMU-USART2_CTS
FMU-USART2_RTS
FMU-USART2_TX
FMU-USART2_RX
BARO_CS
U101PORTD_H
PD8
55
PD9
56
PD10
57
PD11
58
PD12
59
PD13
60
PD15
62
PD14
61
FMU-USART3_TX
FMU-USART3_RX
FRAM_CS
FMU-USART3_CTS
FMU-USART3_RTS
FMU-CH5
FMU-CH6
MPU_DRDY
U101PORTE_I
PE0
97
PE1
98
PE2
1
PE3
2
PE4
3
PE5
4
PE6
5
PE7
38
FMU-USART8_RX
FMU-USART8_TX
SPI_EXT_SCK
VDD_3V3_SENSORS_EN
SPI_EXT_NSS
SPI_EXT_MISO
SPI_EXT_MOSI
FMU-UART7_RX
U101PORTE_H
PE8
39
PE9
40
PE10
41
PE11
42
PE12
43
PE13
44
PE14
45
PE15
46
FMU-UART7_TX
FMU-CH4
VDD_5V_HIPOWER_OC
FMU-CH3
FMU-CH2
FMU-CH1
FMU-LED_AMBER
VDD_5V_PERIPH_OC
OSC_IN
12
OSC_OUT
13
U101OSC
8pF
C102
8pF
C103
GND
X101
GND
VDD
8
VSS
4
C
6
D
5
Q
2
S
1
W
3
HOLD
7
104
C1
GND
U102
FMU-VDD_3V3 FRAM_SCK
FRAM_MOSI
FRAM_MISO
FRAM_CS
U201PORTA_I
PA0
10
PA1
11
PA2
12
PA3
13
PA4
14
PA5
15
PA6
16
PA7
17
IO-CH1
IO-CH2
220R
R203
220R
R204
SERIAL_IO_TO_FMU
SERIAL_FMU_TO_IO
VDD_SERVO_SENS
RSSI_IN
IO-CH5
IO-CH6
U201PORTA_H
PA8
29
PA9
30
PA10
31
PA11
32
PA12
33
PA13
34
PA14
37
PA15
38
PPM_INPUT
IO-USART1_TX
IO-USART1_RX
SPARE PWM
RSSI_IN
IO-SWDIO
IO-SWCLK
IO-VDD_SERO_IN_FAULT
U201PORTB_L
PB0
18
PB1
19
PB2
20
PB3
39
PB4
40
PB5
41
PB6
42
PB7
43
IO-CH7
IO-CH8
10K
R202
GND
IO-SWO
SBUS_OUTPUT_EN
SAFETY
spare gpio
spare gpio
U201PORTB_H
PB8
45
PB9
46
PB10
21
PB11
22
PB12
25
PB13
26
PB14
27
PB15
28
IO-CH3
IO-CH4
SBUS_OUTPUT
SBUS_INPUT
spare gpio
IO-LED_SAFETY
IO-LED_BLUE
IO-LED_AMBER
U201PORTC
PC13
2
PC14
3
PC15
4
VDD_3V3_SPEKTRUN_EN
spare gpio
spare gpio
U201RESET
NRST
7
BOOT0
44
IO-BOOT0
10K
R801
GND
104
C801
GND GND
RESET
S801
2 1
IO-RESET
VBAT
1
VDDA
9
VSSA
8
U201AN_POWER
VBAT
IO-VDD_3V3
GND
U201POWER
VDD_1
24
VDD_2
36
VDD_3
48
VSS_1
23
VSS_2
35
VSS_3
47
GND
104
C804
104
C803
104
C802
IO-VDD_3V3
GNDGNDGND
U201PORTD/OSC
PD0/OSC<=
5
PD1/OSC=>
6
104
C2
104
C3
X1
GND
GND
PPM
1
+5V
2
GND
3
JX801
IO-USART1_TX
IO-USART1_RX
GND
P$1
P$1
P$2
P$2
P$3
P$3
VDD_3V3_SPEKTRUM
IO-UART1_RX
PESD0402-140
D801
GND GND
spektrum/DSM
IO_SERIAL1
JX802-VTREF
JX802-TMS/SWDIO
JX802-TCK/SWCLK
JX802-TDO/SWO
JX802-TDI/EXTB
JX802-RESET
JX802-GND1
JX802-GND2
JX802-GND3
IO_VDD_3V3
IO_SWDIO
IO_SWCLK
IO_SWO
GND
ARM_MINI_JTAG-AMT
STM32F427VITG
STM32F100C8T6
VDD
6 11 15 19 21 22 28 41 46 50 75 91 93 100
VCAP_1
49
VCAP_2
118
VSS
10 20 27 74 99
2U2
C16
FMU-VDD_3V3
2U2
C17
104
C18
104
C19
104
C20
104
C21
GND
NRST
14
U101VDD
BOOT0
15
U101RESET
FMU-BOOT0
FMU-RESET
104
C22
10K
R44
GNDGNDGND
RESET
S1
2 1
VDD_5V_INPOWER
10K
R45
10K R46
GND
VDD_5V_SENS
下载后可阅读完整内容,剩余3页未读,立即下载
2893 浏览量
396 浏览量
2024-11-25 上传
2024-11-25 上传
370 浏览量

天涯@天涯
- 粉丝: 1
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网络蜘蛛基本原理和算法
- 搜索引擎基本原理和算法介绍
- 计算机网络第四版(谢希仁)习题详细答案.doc
- Efficient C++ Performance Programming TechniquesAddison.Wesley.Efficient.C...Performance.Programming.Techniques.pdf
- CISCO路由器配置手册.doc
- IAR-AVR C编译器指南.pdf
- 软件工程学习书《人月神话》
- 40种网页常用小技巧
- rose ha 配置文档
- Software Architecture4+1
- 索引的SQL语句优化
- C++实现人工神经网络的类
- Qt嵌入式图形开发(入门篇)
- J2EE中文教材.doc
- 实战XML第二版.pdf
- Qt嵌入式图形开发(基础篇).pdf
