车载摄像头的图像处理深度解析:从光线到镜头原理
需积分: 0 155 浏览量
更新于2024-06-15
收藏 15MB PDF 举报
车载摄像头-图像处理流程
车载摄像头作为现代车辆的重要组成部分,其工作原理涉及复杂的图像处理流程。首先,让我们深入了解摄像头的基本工作原理。当光线通过车外的环境进入摄像头时,每个传感器单元(像素)实际上记录的是来自物体上所有点的光的积分。这就形成了所谓的"光敏点阵",即每个像素都捕捉到一定区域内的颜色信息。
传统的图像采集方法是基于针孔相机(或称暗箱)的概念,即一个只有单一通光孔的装置。针孔的效果会导致线性透视,视角固定于孔洞的位置。如果针孔过大,会造成几何模糊,因为光束在穿过孔洞时会扩散;相反,如果孔洞过小,光会发生衍射,导致光点失真,形成光斑。因此,找到合适的孔径大小是保证图像清晰的关键。
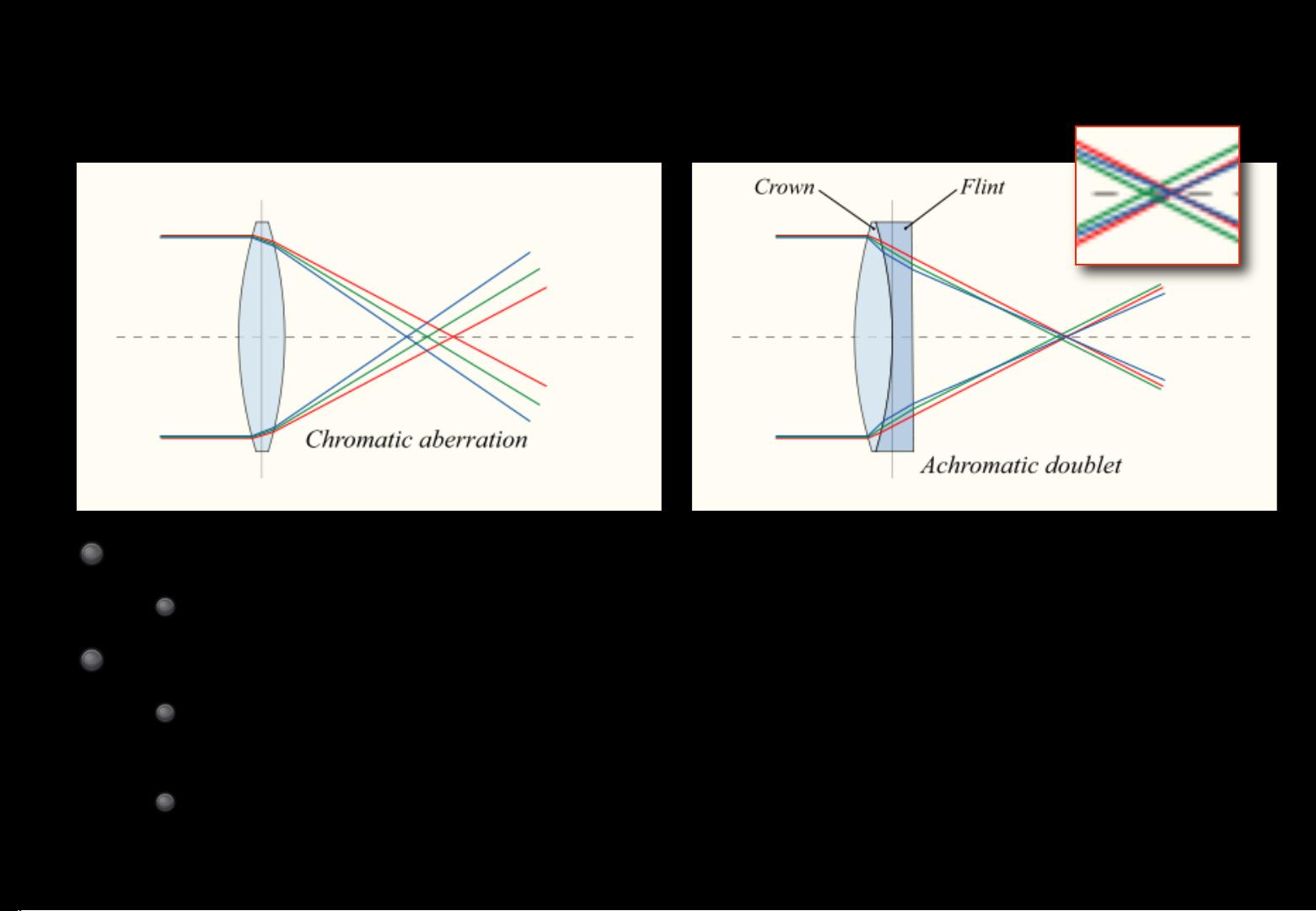
为了增加光线的利用率,真实镜头则更为复杂,通常采用薄透镜的近似模型——高斯光线图解。这个模型有助于我们理解光线如何汇聚,使得镜头能聚焦到不同的距离。改变焦距实际上是通过调整传感器与镜头之间的相对位置来实现的。例如,当焦距设置为两倍于传感器对焦距离(即f=2f),我们可以得到1:1的比例成像,也就是通常所说的“微距”或“宏观”拍摄,因为在这样的设置下,物距等于像距,即1f = 1v。
然而,由于物理限制,我们无法在无限远的地方聚焦,这意味着对于某些极端的焦距,如无限远,聚焦就变得不可能。这就涉及到镜头的光学设计和计算成像技术,如Kari Pulli的VP Computational Imaging,它利用先进的算法来补偿这些物理限制,实现更广泛场景下的清晰成像。
车载摄像头的图像处理流程涉及从光线入射、通过针孔或镜头的光聚焦,再到传感器的光电转换和信号处理,最后到数字图像的生成。这个过程不仅依赖于硬件设备的设计,还依赖于精密的图像算法,以便在各种光照条件和距离下提供高质量的实时视觉信息。理解并优化这一流程对于确保行车安全和提升驾驶辅助系统性能至关重要。
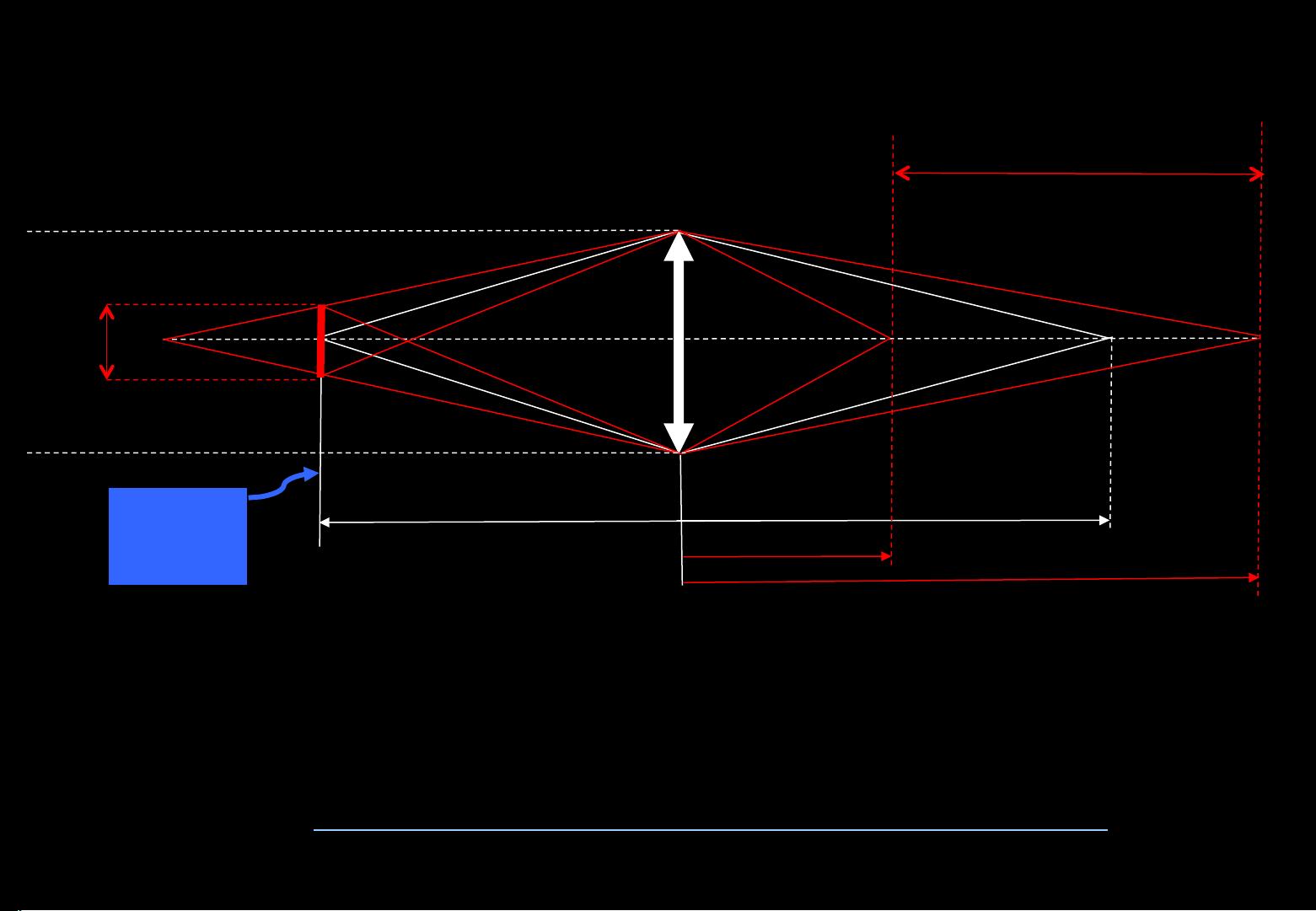
Focusing
D
d
D
far
D
near
1
D
near
=
1
D
+
1
d
c / A
( )
,
1
D
far
=
1
D
−
1
d
c / A
( )
c
A
camera
scene
Sensor
position
DOF
• Depth of field (DOF) = the range of distances that are in focus
http://graphics.stanford.edu/courses/cs178/applets/dof.html
剩余77页未读,继续阅读
点击了解资源详情
2021-09-23 上传
2023-12-22 上传
2021-10-02 上传
2021-08-28 上传
2019-06-26 上传

乐分享-程序员
- 粉丝: 816
- 资源: 22
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
