MATLAB Simulink仿真实验:S函数与系统分析
版权申诉
174 浏览量
更新于2024-07-07
收藏 1.13MB DOC 举报
"Matlab Simulink仿真实验S函数分析文档"
在Matlab的Simulink环境中,S函数是一种自定义的动态系统模型,它允许用户以编程方式定义系统行为,以满足特定的仿真需求。这篇文档主要讨论了如何在Simulink中使用S函数进行仿真实验,并通过实例展示了SIMULINK常用模块的应用和建模技术。
实验三的目的是通过SIMULINK常用模块来理解和应用建模仿真以及子系统与模块封装技术。首先,文档介绍了如何利用积分模块构建一个简单的系统模型。通过在Command窗口中设置输入变量u的值和积分器的初始条件(如x1和x2),可以观察到不同的时间响应曲线和相平面曲线。例如,当u=1且x1初始值为1,x2初始值为2时,给出了对应的时间响应和相平面曲线。随着参数的变化,这些曲线也会相应改变,展示出系统动态特性。
接下来,文档展示了两个不同的仿真数学模型。每个模型由一系列SIMULINK模块组成,包括但不限于信号源、运算模块和积分器。通过观察这些模型的输出,可以验证模型的正确性和对输入变化的响应。在某些情况下,使用Display数值显示模块来直观地查看输出变量的值。
在模型分析中,文档提到了两种方法来表示状态空间模型。通过调用`linmod`函数,可以获取系统状态空间表达式(A、B、C和D矩阵),这有助于理解系统的动态行为。无论采用哪种方法,得出的状态空间矩阵都是相同的,这证明了不同建模方式的等效性。
此外,文档还探讨了双输入双输出系统的处理,通过将增益模块更改为矩阵增益来适应多输入多输出(MIMO)系统的建模。这使得Simulink能够处理更复杂的系统,模拟多个输入如何影响多个输出。
这篇文档深入浅出地介绍了如何在Simulink中使用S函数和基本模块进行系统建模、仿真以及状态空间表达式的获取。这对于理解和应用Simulink进行系统分析和设计是非常有帮助的,特别是在控制系统设计和研究领域。通过实际操作和案例分析,学习者可以更好地掌握Simulink的使用技巧,并为后续的复杂系统仿真实验打下坚实基础。
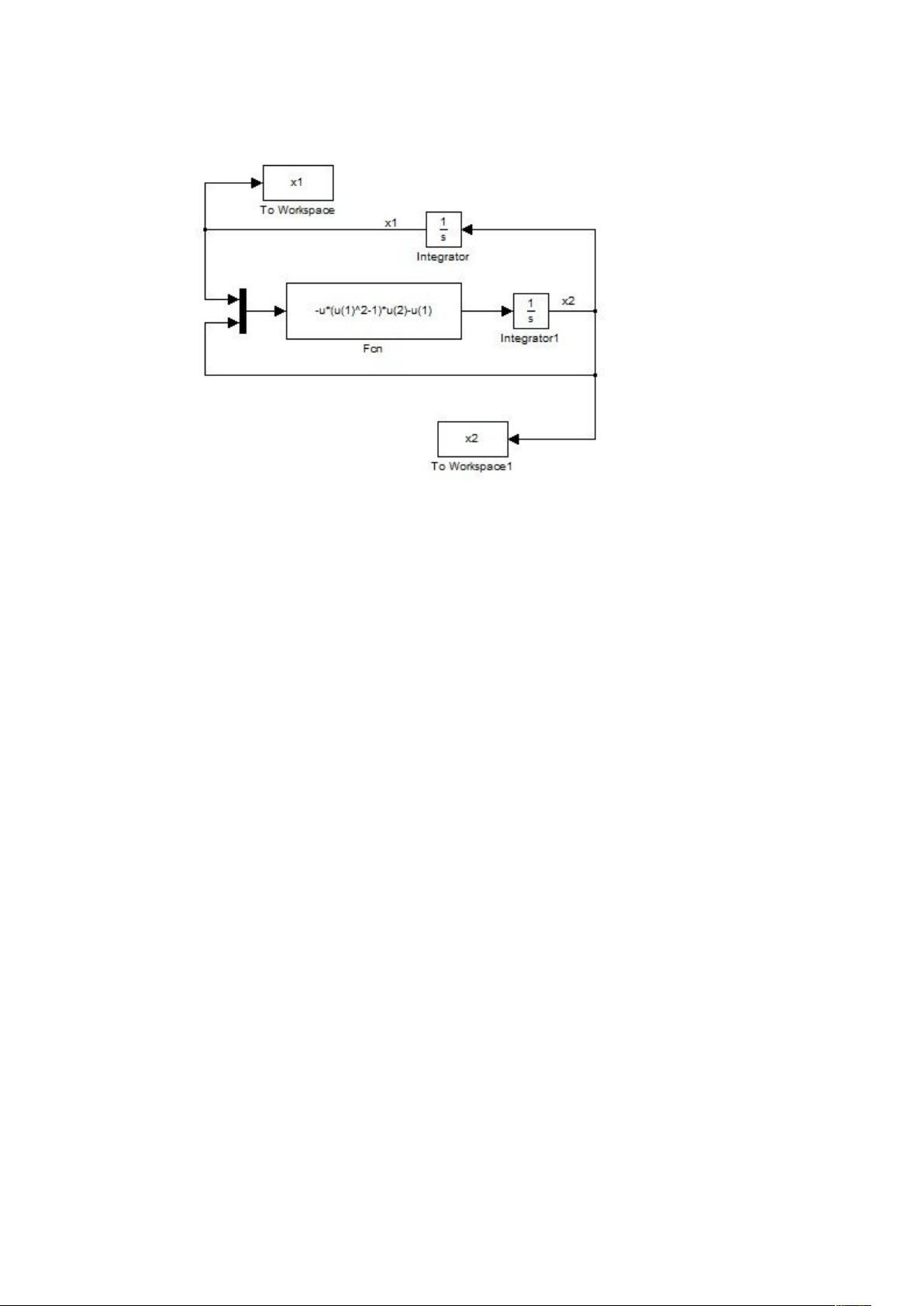
(2)simulink 仿真模型如下所示:
得到的各曲线图和上题一样,以下不做叙述。
剩余18页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-04 上传
2022-07-05 上传
2023-04-17 上传
2022-07-04 上传
2021-11-25 上传
2021-07-06 上传

猫一样的女子245
- 粉丝: 230
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







