Matlab摄像机标定工具箱详解与应用
下载需积分: 13 | PDF格式 | 1.53MB |
更新于2024-07-19
| 133 浏览量 | 举报
"本文介绍了如何使用Matlab中的张正友摄像机标定工具箱进行摄像机标定的过程。该工具箱提供了摄像机内参和外参的标定功能,适用于计算机视觉和机器人视觉等领域。"
在计算机视觉领域,摄像机标定是一项重要的任务,它能够帮助我们了解摄像机的内在特性,如焦距、主点位置以及畸变系数等。Matlab摄像机标定工具箱是由J. Bouguet开发的,适用于基于Matlab的平台,用于进行精确的摄像机内参数和外参数标定。该工具箱包括了标定模型、图像采集、标定过程以及结果分析等一系列功能。
首先,我们需要从指定链接下载并安装工具箱。安装过程简单,只需将下载的压缩文件解压,并将包含的目录复制到Matlab的工作目录下。在采集图像时,为了方便处理,建议遵循统一的命名规则,例如以基本名称加三位数字编号的方式命名。
在摄像机标定模型中,工具箱使用的是Brown的畸变模型,如公式(1-1)和(1-2)所示。这个模型考虑了镜头的径向畸变和切向畸变,其中(u, v)表示图像坐标,(xc, yc, zc)表示特征点在摄像机坐标系中的坐标,kx、ky是焦距归一化后的放大系数,ks则与摄像机x、y轴的非垂直性有关。此外,(u0, v0)表示光轴中心点的图像坐标,即主点坐标,(xc1, yc1)是焦距归一化后的成像点坐标。式(1-2)描述了畸变后的坐标计算。
在实际标定过程中,我们需要准备一个棋盘格图案作为标定目标,通过采集不同角度下的图像,工具箱会自动检测棋盘格角点,然后利用这些角点的信息来估计摄像机的内参数和外参数。内参数包括焦距、主点位置以及畸变系数,而外参数则涉及摄像机在世界坐标系中的位置和姿态。
标定完成后,我们可以得到一个标定矩阵M,它包含了所有必要的参数,用于将三维世界坐标转换为二维图像坐标。这个矩阵可以应用于去除图像的畸变,提高图像质量和精度,这对于后续的物体识别、跟踪和三维重建等应用至关重要。
Matlab摄像机标定工具箱提供了一套完整的解决方案,使得用户能够方便地对摄像机进行标定,从而获得准确的摄像机模型。通过理解和熟练运用这个工具箱,可以在计算机视觉项目中提高算法的鲁棒性和精度。
4
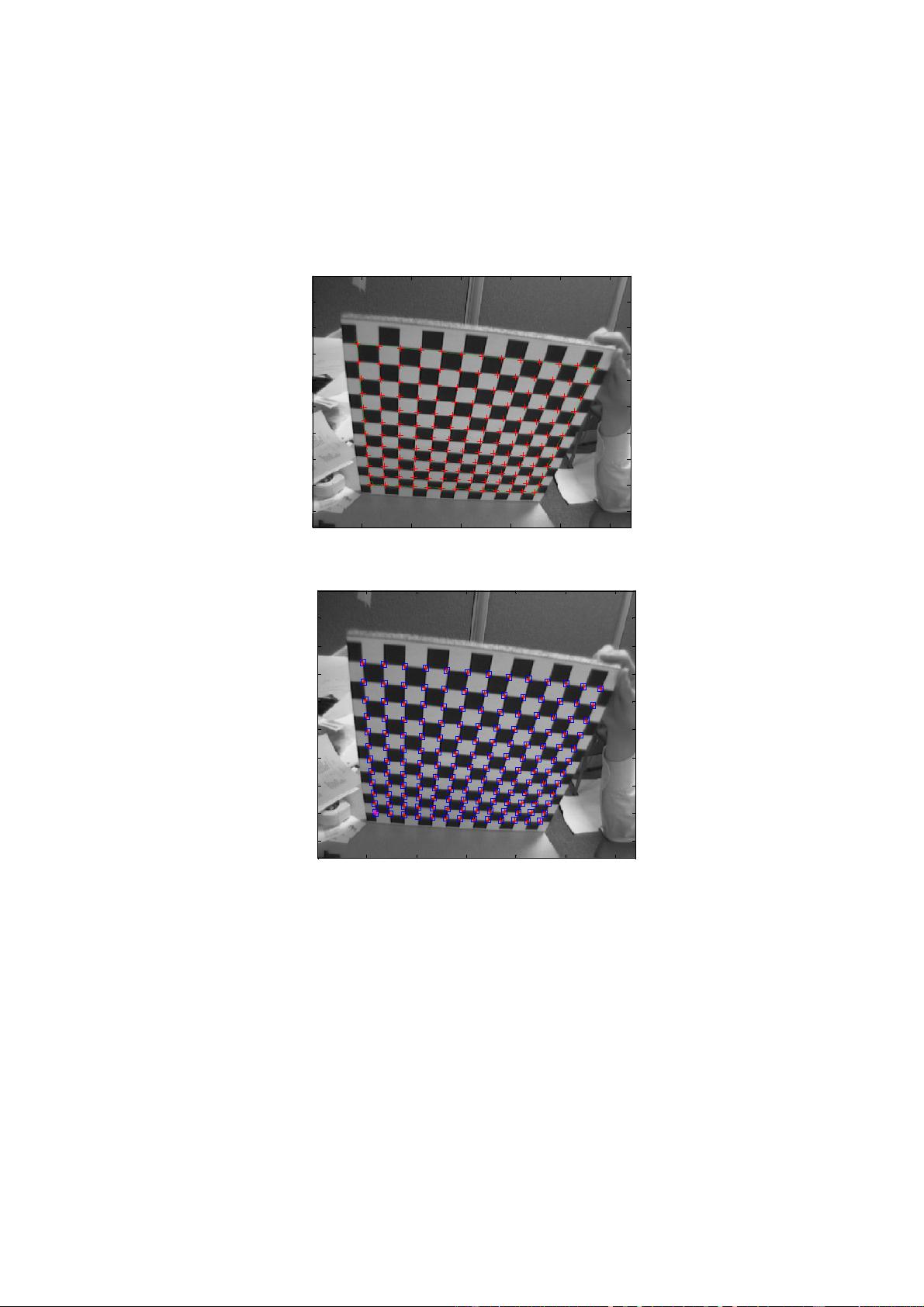
近;图 4(b)中的每个角点提取区域窗口包含了角点,表示角点提取结果的十字标记位置与角
点位置具有很好的吻合度。同样在 m=5,n=5 时,未输入畸变初始值,但通过鼠标点击设定
棋盘格靶标的选定区域时,所形成的四边形的边与棋盘格靶标的网格线成较大夹角,此时图
像 Image1 的角点提取结果如图 5 所示。从图 5 中可以发现,图 5(a)中的十字标记位置与角
点具有明显偏差,部分十字标记远离角点;图 5(b)中的很多角点提取区域窗口没有包含角点,
表示角点提取结果的十字标记位置并不在角点位置,说明角点提取存在错误。
X
Y
O
The red crosses should be close to the image corners
100 200 300 400 500 600
50
100
150
200
250
300
350
400
450
(a)
O
dX
dY
Xc (in camera frame)
Yc (in camera frame)
Extracted corners
100 200 300 400 500 600
50
100
150
200
250
300
350
400
450
(b)
图 4 合适的靶标选定区域与角点提取结果,(a) 靶标选定区域,(b) 角点提取结果
(3) 内参数标定
对用于标定的每一幅靶标图像进行角点提取后,在图 2 所示的标定工具箱操作面板点击
“Calibration”键,即可完成摄像机的内参数标定。
内参数标定时,Matlab 工具箱首先进行初始化,即将图像中心点坐标作为主点坐标的
初始值,采用平面靶标网格的消失点估计出摄像机的内参数作为内参数的初始值,畸变初始
值设为 0。镜头畸变采用包括径向畸变和切向畸变的 Brown 畸变模型,并假设 6 阶径向畸变
系数 kc(5)=0。假设摄像机的 x 轴与 y 轴严格垂直,即图像坐标(u, v)与归一化成像平面内的
成像点坐标(x
c1
, y
c1
)解耦,k
s
=0,内参数采用 4 参数模型。数组 est_dist(1:5)是畸变系数 kc(1:5)
是否标定的标志,只对标志取值为 1 的畸变系数标定,标志取值为 0 的畸变系数不标定。
剩余16页未读,继续阅读
相关推荐





飞哈Lee
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
