自动平行泊车策略与算法实现
需积分: 14 61 浏览量
更新于2024-09-16
收藏 252KB PDF 举报
"Automatic Parallel Parking - Y.K. Lo, A.B. Rad, C.W. Wong, M.L. Ho - The Hong Kong Polytechnic University"
本文档详细介绍了一种自动平行泊车策略,该策略针对类似车辆的机器人进行设计。作者在文中探讨了不同类型的平行泊车情况,特别是针对矩形空间的泊车问题。整个泊车过程分为三个阶段:扫描阶段、起始阶段和操作跟踪阶段。
在扫描阶段,机器人装备的红外传感器用于探测泊车环境,以寻找合适的泊车位置。这一步骤至关重要,因为传感器必须能够准确识别出可用的停车位,避免与其他物体发生碰撞。
接下来是起始阶段,路径规划算法生成适合不同停车位的行驶路径。机器人会倒退至停车位边缘,开始执行泊车策略。这一阶段涉及到精确的路径计算,确保机器人能够安全地进入停车位。
在操作跟踪阶段,机器人遵循预先规划的路径移动到预定的泊车位置。这个阶段的成功与否取决于前一阶段扫描的矩形空间的宽度,因为这直接影响机器人的转向和移动控制。
该策略已经在一种类似车辆的机器人上实现,目的是为了未来能作为驾驶员的辅助工具。文章的介绍部分还暗示了这项研究是在自动驾驶技术日益普及的背景下进行的,旨在提高停车效率和安全性,减少人为错误。
自动平行泊车系统的设计和实现涉及多个关键技术,包括传感器融合、路径规划、运动控制以及实时决策算法。传感器融合技术结合了多种感知设备(如红外传感器)的数据,提供更全面的环境理解。路径规划则需要高效的算法来计算最优路径,考虑到车辆的尺寸、障碍物的位置和动态限制。运动控制则涉及车辆的精确定位和导航,确保机器人能够按照规划路径准确无误地停入车位。
此外,该策略可能还包括防碰撞机制、障碍物检测和避障算法,以应对泊车过程中可能出现的突发情况。这些技术的应用对于提升自动驾驶系统的可靠性和用户体验至关重要。
这篇文献深入探讨了自动平行泊车的各个方面,不仅对机器人技术,也对自动驾驶汽车行业的发展具有重要的理论和实践意义。通过这种自动泊车策略,未来驾驶者可以更加轻松地应对复杂的泊车挑战,同时也为无人驾驶技术在现实生活中的应用铺平道路。
0
Automatic Parallel Parking
Y.
K.
Lo,
A.
B.
Rad,
C.
W.
Wongand
M. L.
Ho
Depment
of
Elech-ical Engineering
The Hong Kong Polytechnic University
Hung Hom, Kowloon,
Hotig Kong
Abstract
An automated parallel parking strategy for a vehicle-like
robot
is
presented. This study addresses general
casts
of
parallel
parking within a rcctangular spacc. The procedure consists
of
three phases. In scanning phase. Infrared sensors
in
the robot
arc usedtoscanningthe parking environment inorder tosearch
a suitable parking position. Then maneuvcring path
is
generated for different parking space
in
the
next phase, starting
phase. The robot moves backward
to
the edge ofthe parking
space and starts
its
parking strategy.
In
maneuver tracking
phase. the robot follows the inaneuvering path
to
the parking
position. It depends on the width of the rectangular space
which has been scanned in the previous phase. This strategy
has been implemented in a vehicle-like robot and
is
developed
for an assistant to help human drivers in the future.
1.
Introduction
An automated parallel parking strategy for
a
vehicle-like robot
is
presented. This study
is
part
ofthc
research project
in
t,hc
development of the autonomous vehicle control. I’arallel
parking
is
difficult for human driver especially Ibr beginners.
Therefore.
this
type
or
problems altracts a great deal
of
attention from the research community. This research
is
derived
from the
study ofmotion-planning
ofrobots. There exists many
algorithms in robot motion planning and they were difficult to
apply those algorithms into fourwheels vehicle parking cases.
The research
on
this
topic
can
be
clissifird
into
two
groups:
I-stabilization of the vehicle to a point by means of feedback
state;
2-
planning a feasiblc path to reach a point and following
the path. In the lormer category, Yasunobu and Murai
[I]
have
proposcd
a
controllcr based on human experience to develop a
hierarchical fuzzy control and predictive fuvy control for
vehicle parking. The vehicle
is
controlled moving point
by
point. That algorithm generates the mancuvering path point by
point from the human knowledge base
in
the predictive fuzzy
controller. Researchcn
1101
only concerning the classical
four
wheels vehicle. trailer vehicle are also considered. Jenkin and
Yuhas
121
have reported
a
simplified neural network controller
by
decomposition. The neural controller
is
decomposed
by
subtasks. The neural controller
is
trained based on the
kinematics data, however the decomposed neural network
require
less
training time thus it has simplified the training
process. Kin,jo. Wang and Yamamoto
[3]
have used Genetic
Algorithm (GA)
to
oplimk
neural
Contmller
for controlling
trailer truck. Initially theneural controller
is
produced randomly
and GA changes
the
weighting
afthe
controller
to
a
suitable
due. The algorithms discussed above are based on the
kinematics data to formulate intelligent controllers.
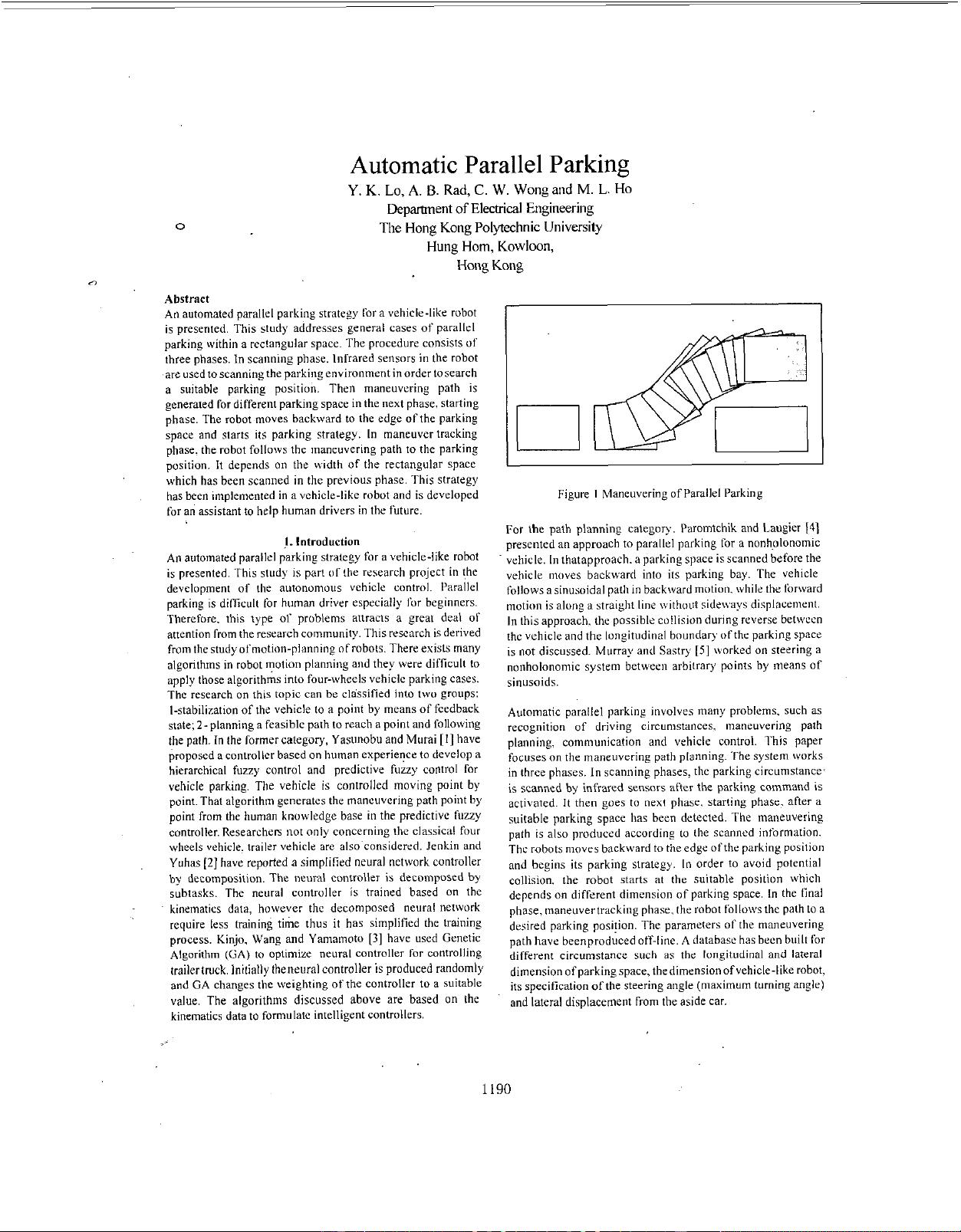
Figure
I
Maneuvering
of
Parallel Parking
For the path planning category. Paromtchik and Laugier
141
presented an approach
to
parallel parking for a nonholonomic
vehicle. In thatapproach. a parking space
is
scanned before the
vehicle moves backward into
its
parking bay. The vehicle
follows
a
sinusoidal
path
in backward motion. while the fbrward
motion
is
along
a
straight line withoot sideways displacement.
In this approach.
the
possible collision during reverse betwecn
thc vehicle and thc longitudinal bnundar) ofthe parking space
is
not discussed. Murray and Sastry
[5]
worked on steering
a
nonholonomic system between arbitrary points by means
of
sinusoids.
Automatic parallel parking involves inany problems. such as
recognition
of
driving circumstances. maneuvering path
planning. communication and vehicle control. This paper
focuses
on
the maneuvering path planning. ‘The system works
in
three phases. In scanning phases: the parking circumstance,
is scanned by infrared
srnsors
after the parking command
is
activated. It then
gucs
to
ncxt
phasr. starling phase. after
a
suitable parking space has been detected. The maneuvering
path
is
also
produced according to the scanned information.
The robots
movrs
backward
to
the edge ofthr parking position
and begins its parking strategy. In order to avoid potential
collision.
the
robot starts
at
thc
suitable position which
depends on different dimension
of
parking space. In the final
phase. inaneuvertrackiiig phase. the robot followsthc path
10
a
desired parking posi!ion. The parameters ofthe maneuvering
path have beenproduced off-line.
A
database has
been
built for
different ~ir~~mstan~e
such
as
the
longitudinal and
latrral
dimension ofparking space, thedimension ofvehicle-like robot.
its
specification ofthe stcrring
angle
(maximum turning angle)
and lateral displacement from the aside car.
1190
下载后可阅读完整内容,剩余3页未读,立即下载
2021-05-11 上传
2019-08-13 上传
2020-02-17 上传
2021-05-28 上传
2021-03-25 上传
2011-03-26 上传
2013-05-06 上传
2015-12-30 上传

kenneth007
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
