Taiwei磁编码器伺服驱动器V1.3使用手册
需积分: 12 179 浏览量
更新于2024-07-18
收藏 1.16MB PDF 举报
"TaiweiRobotTechnologiesCo.Ltd. 磁编码器伺服驱动器使用说明 V1.3"
这份文档详细介绍了Taiwei Robot Technologies Co., Ltd. 的磁编码器伺服驱动器的使用方法,包括驱动器的规格参数、尺寸、特性、接口说明以及GUI操作指南。以下是该驱动器的主要知识点:
1. **驱动器规格参数**:驱动器的工作电压范围为DC9V~28V,工作电流0.1A~7.5A。它支持的编码器型号是AMS AS5048A磁编码器,提供SPI接口,具备绝对值角度。电机控制精度为0.176°,即360°/2048,能够实现单步控制。驱动器能支持的最小转速为300 counts/s (约4.4 RPM),最大转速大于1000 RPM。
2. **驱动器特性**:电机力矩输出的变化可以通过模拟量输出接口实时指示,这有助于评估机器人的负载。驱动器接口包括脉冲/方向接口、SPI接口和Micro USB串口,其中USB接口采用Silicon Labs芯片,无需额外驱动即可使用。
3. **接口说明**:
- **脉冲/方向接口及FAULT错误指示输出接口**:用于接收脉冲输入来控制电机的速度和位置,同时提供FAULT信号反馈驱动器的异常情况。
- **SPI接口**:与编码器通信,获取电机的精确位置和速度信息。
- **USB串口**:提供与电脑的通信,用于配置、监控和更新驱动器参数。
4. **GUI操作说明**:
- **操作界面**:包含各种设置和监控选项。
- **串口连接参数**:设置与驱动器通信的波特率、数据位、停止位等。
- **电机物理参数修改**:允许用户根据实际使用的电机调整参数。
- **电机更换步骤**:指导用户如何更换电机,并进行后续的校准。
- **电机校准及原点设置**:确保电机准确运行并设定零点位置。
- **PID控制参数修改**:用户可以调整PID控制器的参数以优化性能。
- **配置保存**:有两种方式保存参数,一是本地文件,二是保存到驱动器的FLASH中。
- **电机测试命令**:允许用户执行各种测试以验证电机功能。
- **驱动器状态监控**:包括力矩计算和示波器功能,帮助监控电机运行状态。
5. **附录**:提供了部分串口命令格式,如位置设置、速度设置和状态监控命令,便于通过串口进行高级操作和自定义。
此驱动器适用于三相PMSM、BLDC电机、Gimbal和无刷电机,尤其适合云台电机应用。它的设计考虑了用户友好性和灵活性,支持多种接口和定制选项,使得在不同应用场景下的集成和调试变得更加简便。
Taiwei Robot Technologies Co.Ltd.
4
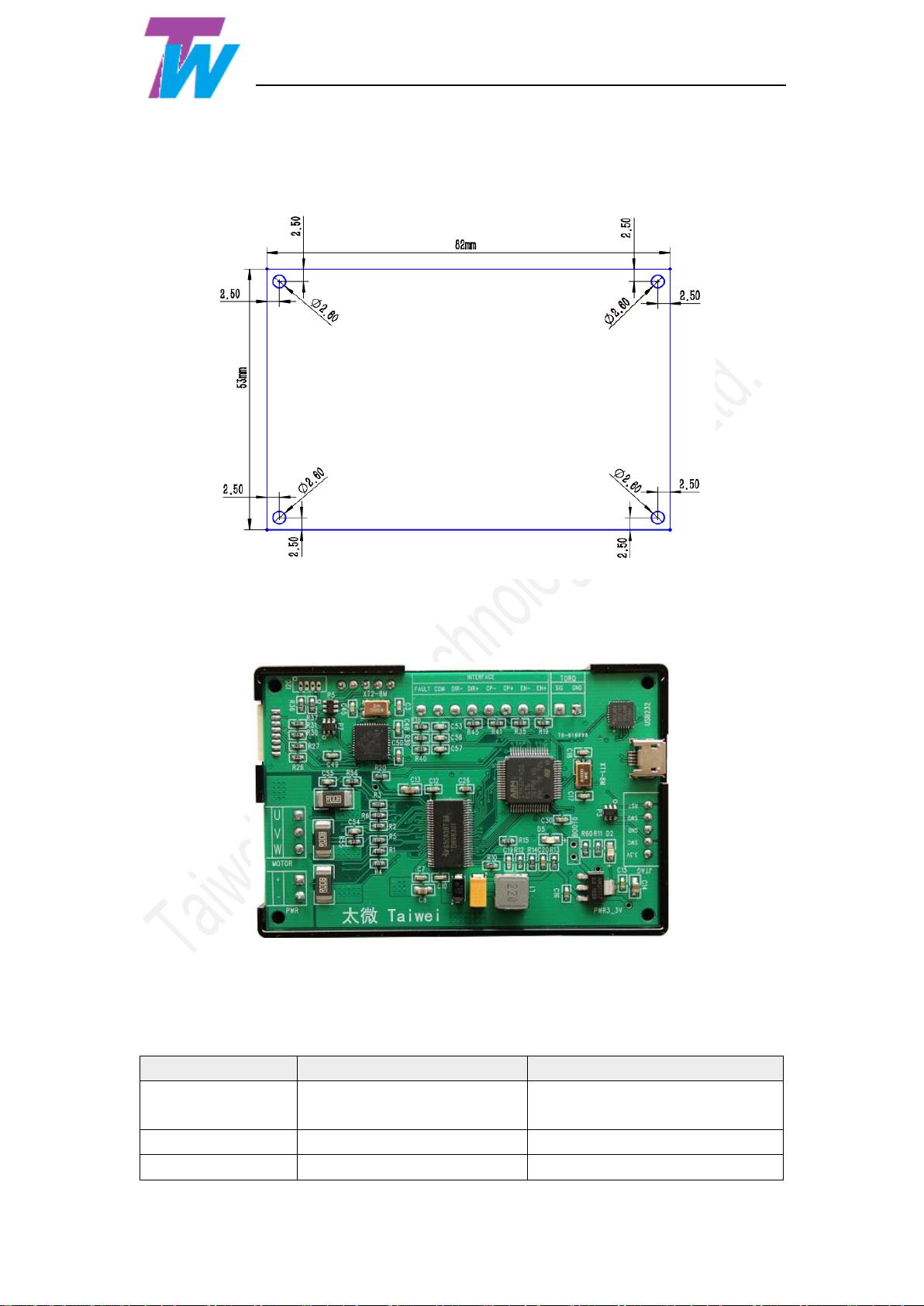
2. 驱动板尺寸图
53mm X 82mm
PCB 板正面照片
3. 驱动器特性
功能
说明
备注
电源防反接保护
最大可保护 100V 电压反接
切勿将驱动器接入超过 31V DC 电
源,否则会造成器件击穿,烧板
过流保护
电机瞬间电流限制为 20A
驱动芯片内部进行保护
短路保护
驱动器带有 10A 保险丝
剩余16页未读,继续阅读
2021-12-12 上传
2022-06-30 上传
2018-01-20 上传
2024-11-07 上传
2023-06-08 上传
2024-11-07 上传
2023-07-05 上传
2023-09-01 上传
2024-11-07 上传

ywhfdl
- 粉丝: 275
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
