智能跟随小车设计:STM32驱动的自动化与运动控制
版权申诉
109 浏览量
更新于2024-06-21
收藏 2.77MB DOCX 举报
自动跟随智能小车设计与运动控制的研究文档探讨了随着科技进步对现代社会带来的智能化影响,特别是在物流和日常生活中自动化解决方案的应用。自动跟随智能小车作为这一领域的创新代表,旨在提高工作效率并减轻人力负担。这类小车的核心功能是能够自动追踪并跟随指定的目标,比如其使用者,这在超市、酒店和生产环境中具有显著的价值。
本文首先介绍了当前智能小车研究的现状,强调了大多数研究集中在智能化技术,如路径规划、避障算法等方面,而自动跟随功能相对较少被关注。作者认为,增强小车的跟随性能力是提升整体智能水平的重要环节,因此决定通过深入研究智能小车的工作原理,特别是采用单片机系统——STM32来构建智能跟随系统。
设计过程包括以下几个关键部分:
1. 车体结构设计:这涉及到小车的整体布局,可能涉及轻量化材料的选择、机械结构的优化以及传感器的集成,确保小车能在移动过程中稳定且耐用。
2. 硬件设计:STM32单片机是核心控制单元,负责处理信号、决策和执行动作。可能还包括无线通信模块,以便接收和发送指令,以及电池管理系统,确保设备的续航能力。
3. 直流电机PWM调速设计:脉宽调制(PWM)技术用来精确控制电机的速度,这对于保持跟随速度的稳定性和准确性至关重要。
4. 定位系统整合:为了实现跟随功能,文中提到可能需要与定位技术结合,如激光雷达、视觉传感器或者超声波传感器,以准确识别和追踪目标位置。
5. 运动控制算法:设计智能算法,使小车能够理解目标的位置变化,并据此调整自己的行驶路线和速度,达到跟随的目的。
关键词:“智能”、“STM32”、“跟随”突出了文章的核心技术点,即如何通过先进的电子技术和精确的运动控制策略,使小车具备自主跟踪的能力。本文的研究不仅提升了小车的实用性,也为同类产品的进一步发展提供了理论支持和技术借鉴。
北京理工大学珠海学院 2020 届本科毕业生设计
7
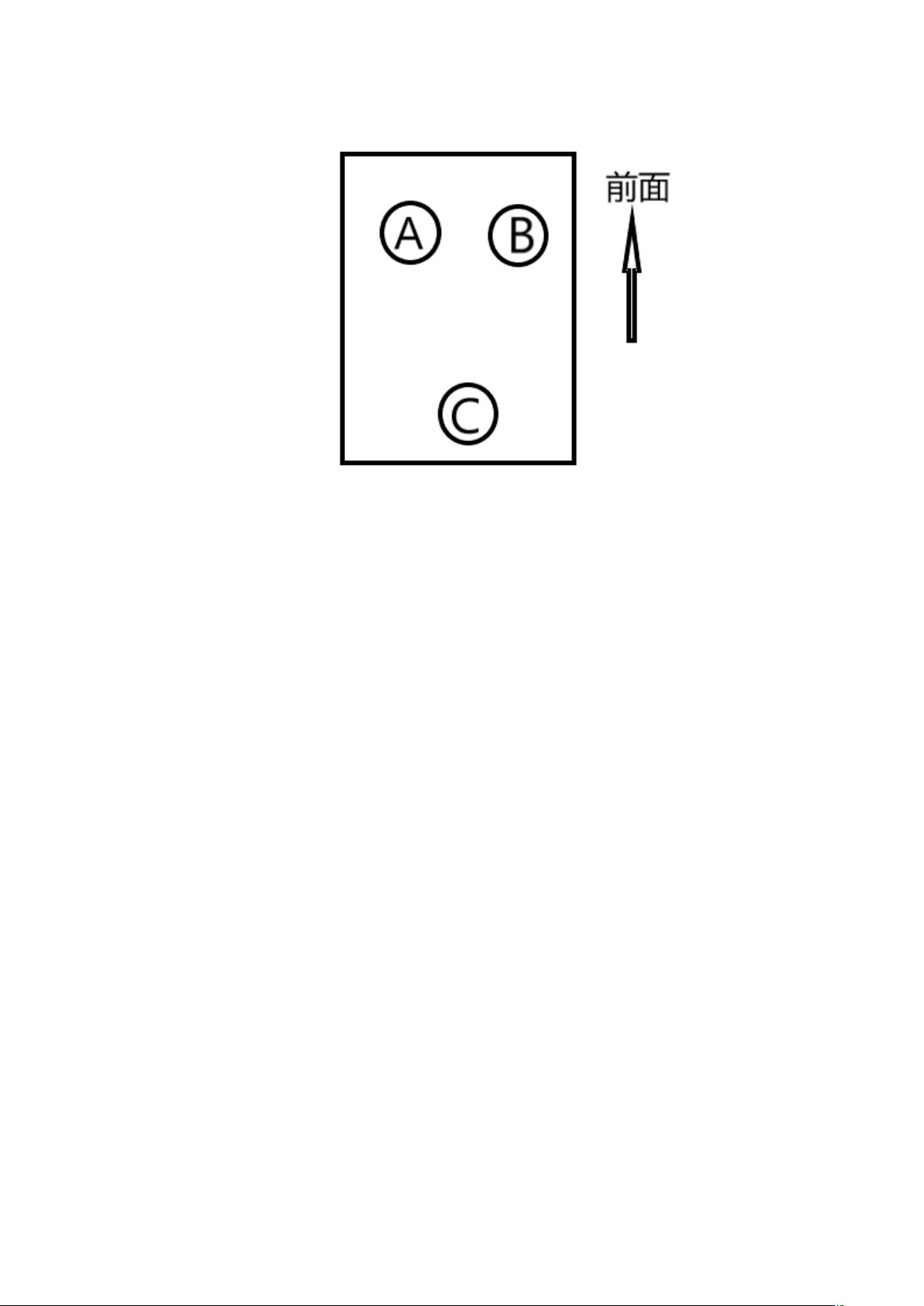
图 2.2 小车结构示意图
2.3 自动跟随智能小车的优点
(1)成本低廉
本文设计的自动跟随智能小车使用的各种传感器的成本低廉,使用简单的传感器就
能达到非常不错的效果。
(2)核心控制技术成熟
小车核心控制芯片为 STM32 芯片,是现在较为普及的单片机芯片,可编程程度高,
被广泛运用于各种商业产品当中。
(3)反应时间迅速
小车通过无线通讯与被跟随物体进行无线数传,通讯延迟时间短,数据传输速率快。
2.4 小车系统硬件设计
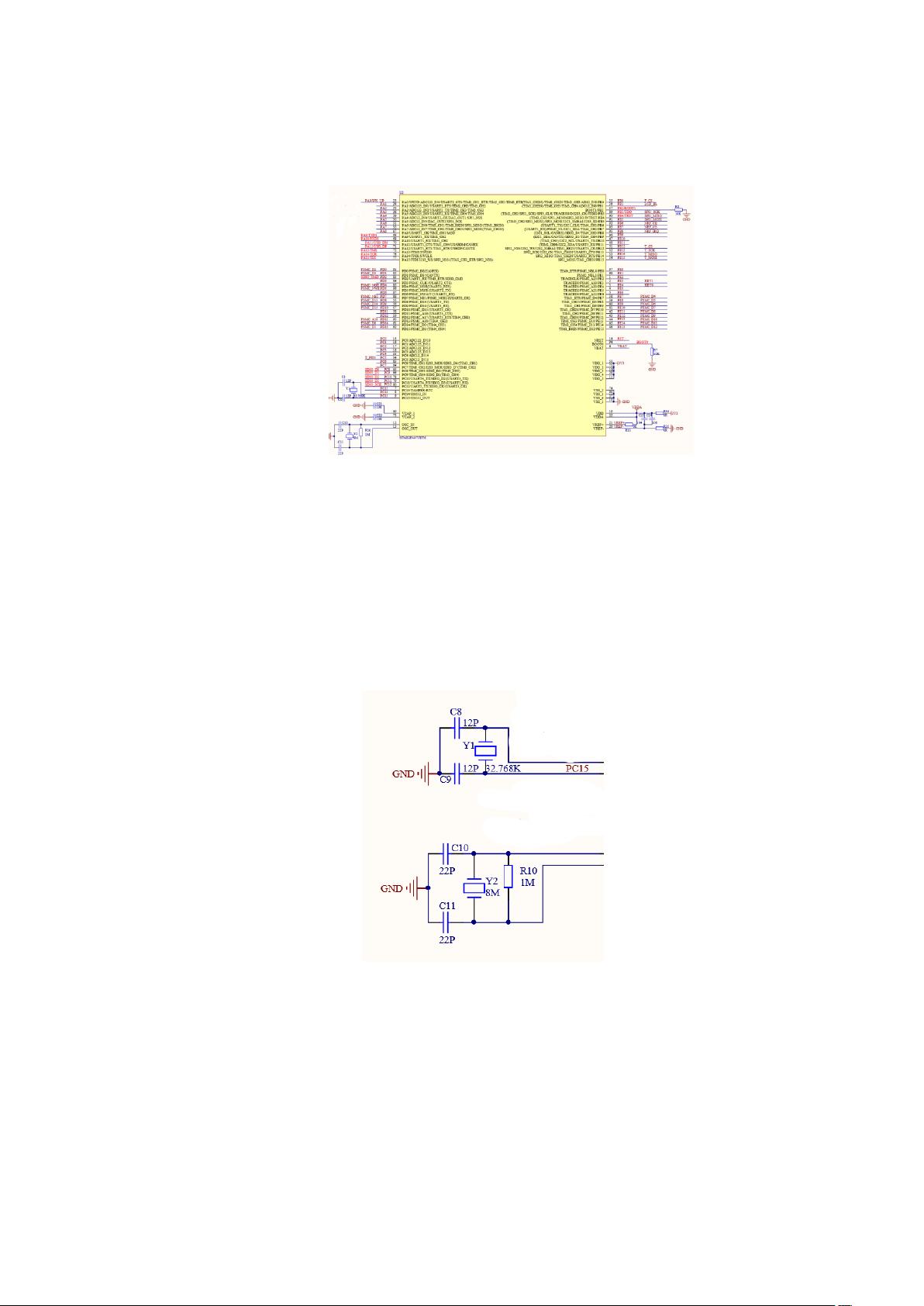
2.4.1 控制器模块
控制器选型:
本次智能小车系统需要完成主要实现小车目标跟随、自动避障、PWM 电机调速等

剩余60页未读,继续阅读
2021-10-02 上传
2022-11-28 上传
2022-06-02 上传
2023-06-10 上传
2023-02-24 上传
2023-05-30 上传
2023-05-31 上传
2023-05-31 上传
2023-09-04 上传









