智能灭火机器人控制系统设计与实现
版权申诉
152 浏览量
更新于2024-06-23
1
收藏 205KB DOC 举报
"灭火机器人控制系统软件设计"
这篇文档主要探讨了灭火机器人控制系统软件的设计与实现,涉及了多个关键技术和模块。灭火机器人作为一种自动化设备,旨在减少火灾造成的人员伤亡和财产损失,尤其在应对危险环境中的火源时,能发挥重要作用。
1.1 题目研究背景、目的及意义:
该课题的背景是火灾灾害频发,对社会造成巨大影响。目的是研发一种基于单片机、智能控制、传感器和机电一体化技术的灭火机器人,能够自动寻找火源、避开障碍物并扑灭火源,同时具备返回安全区和显示行驶过程的功能。这符合科技世博的精神,对消防领域有积极的推动作用。
1.2 国内外研究现状:
机器人的发展迅速,尤其是在发达国家,灭火机器人已取得显著成果。我国在这一领域的研究也在逐步推进,但相比国外仍有差距,需要加强技术研发和创新。
2.2 系统模块设计方案:
- 单片机选择:作为控制系统的核心,选择了特定型号的单片机(如AT89S52)来处理和执行指令。
- 电动机及其驱动模块:电动机用于驱动机器人移动,电动机驱动模块则确保其稳定、精准运行。
- 障碍物检测模块:采用传感器技术,如超声波或红外传感器,帮助机器人识别并避开障碍物。
- 火源检测模块:通过热感应或火焰探测器来定位火源位置。
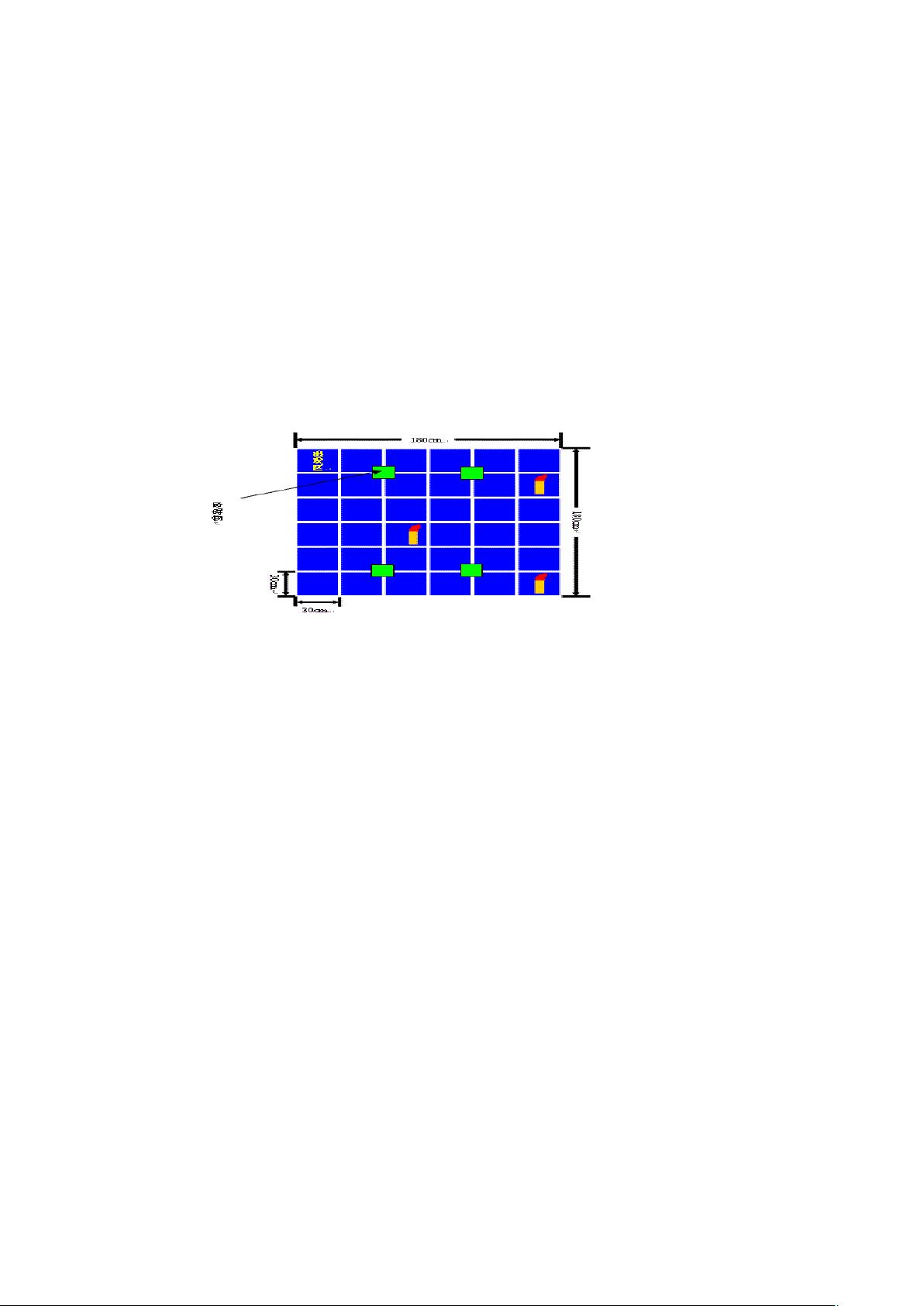
- 灭火区域边界黑线检测模块:利用红外光电对管ST168检测划定的边界线,保持机器人在预设区域内工作。
- 供电电源方案:设计合理的电源管理系统,确保机器人长时间工作。
- 显示模块:使用LCD显示器实时反馈机器人状态和行驶信息。
3. 主要单元电路设计:
- PWM驱动电路控制电动机的转速和方向。
- 障碍物检测模块电路可能包括超声波传感器的发射和接收电路。
- 火源探测模块电路可能涉及温度传感器和光敏元件。
- 灭火区域边界检测电路利用红外光电对管进行信号处理。
- 行驶路程测量模块结合编码器和LCD显示电路,显示小车的行驶路径和距离。
4. 软件设计:
主程序软件流程图设计,包括火源搜索算法(如遍历法)、寻轨算法、避障策略以及灭火操作的控制逻辑。
5. 系统测试数据及结果分析:
这部分详细记录了实验测试数据,分析了机器人的性能指标,如火源定位精度、避障效果和灭火效率等。
6. 结束语:
论文总结了研究成果,强调了该灭火机器人系统的实际应用价值和对未来消防技术的贡献。
关键词:涉及到的关键技术包括AT89S52单片机、遍历法寻轨算法、灭火机器人的智能控制等。
这篇文档提供了一个全面的灭火机器人控制系统设计框架,涵盖了硬件选型、软件编程以及系统集成等多个方面,对于理解和开发此类机器人具有重要参考价值。

业、牧业,对医疗机器人叫医用机器人,还包括娱乐机器人,建筑和居室上用的
机器人,所以从应用分类,它包括从行业、应用角度,也可以进行这样简单的分
类。
1.2.2 我国灭火机器人的发展状况
由于我们国家存在很多其他的各种因素、问题。我们国家在机器人的研究,
在 20 世纪 70 年代后期,当时我们在国家北京举办一个日本的工业自动化产品展
览会,在这个会上有两个产品,一个是数控机床,一个是工业机器人,这个时候,
我们国家的许多学者,看到了这样一个方向,开始进行了机器人的研究,但是这
时候研究,基本上还局限于理论的探讨阶段,那么真正进行机器人研究的时候,
是在七五、八五、九五、十五将近这二十年的发展,发展最迅速的时候,是在 1986
年我们国家成立了 863 计划是高技术发展计划,就将机器人技术作为一个重要的
发展的主题,国家投入将近几个亿的资金开始进行了机器人研究,使得我们国家
在机器人这一领域得到很快地、迅速地发展。
目前主要单位像中科院沈阳自动化所,原机械部的北京自动化所,像哈尔滨
工业大学,北京航空航天大学,清华大学,还包括中科院北京自动化所等等的一
些单位都做了非常重要的研究工作,也取得了很多的成果,而且目前这几年来看,
我们国家在高校里边,有很多单位从事机器人研究,很多研究生和博士生都在从
事机器人方面的研究,目前我们国家比较有代表性的研究,有工业机器人,水下
机器人,空间机器人,核工业的机器人,都在国际上应该处于领先水平,总体上
我们国家与发达国家相比,还存在很大的差距,主要表现在,我们国家在机器人
的产业化方面,目前还没有固定的成熟的产品,但是在上述这些水下、空间、核
工业,一些特殊机器人方面,我们取得了很多有特色的研究成就。
剩余32页未读,继续阅读
2023-07-11 上传
2021-09-18 上传
2023-07-15 上传
2023-05-22 上传
2023-10-12 上传
2023-12-10 上传
2023-05-20 上传
2023-05-30 上传
2024-10-26 上传

omyligaga
- 粉丝: 88
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







