对极几何与三角测量详解:从基础到应用
需积分: 0 101 浏览量
更新于2024-08-05
收藏 567KB PDF 举报
"对极几何与三角测量是计算机视觉领域中的关键概念,它们在多视图几何中扮演着重要角色,特别是在相机定位、立体视觉和SLAM(Simultaneous Localization And Mapping)系统中。对极几何描述了从不同视角观察同一场景时,图像特征之间的约束关系,而三角测量则是通过这些约束恢复3D点的位置。"
一、对极几何的基本思想
对极几何是处理双目或多目视觉系统中图像匹配问题的基础理论。它涉及到两个摄像机的相对位置和姿态,以及它们共同观察的3D点。在对极几何中,存在一个称为极平面的特殊平面,它由3D点、两个相机光心和基线(两相机中心连线)构成。两个相机的成像平面与极平面相交,形成两条极线,每条极线都经过相应的极点(相机光心在对方图像上的投影)。当3D点在第一幅图像上投影为点p1时,其在第二幅图像上的对应点p2必然位于与p1对应的极线上,这一特性极大地简化了特征匹配过程,将二维搜索降为一维搜索。
二、基础矩阵和本征矩阵
基础矩阵(Fundamental Matrix)和本征矩阵(Essential Matrix)是描述两幅图像之间几何关系的数学工具。本征矩阵只包含两相机间的相对旋转和平移信息,是在归一化坐标系下的表示。基础矩阵则更进一步,除了位姿信息外,还包含了相机的内参数,如焦距和主点坐标,它是在图像坐标系中定义的。通过3D点的投影关系,可以推导出这两个矩阵。例如,如果一个3D点P在第一幅图像上的投影为p1,经过相机内参K变换后得到归一化坐标x1,而在第二幅图像上经过旋转R和平移t后的投影为p2,其归一化坐标为x2,那么x2和x1之间的关系可以通过基础矩阵F表示,即x2'Fx1=0。这里的x2'表示x2的转置,遵循矩阵乘法规则。
三、三角测量
三角测量是利用对极几何约束来恢复3D点位置的过程。在已知两幅图像的对应特征点对以及相机的内参和相对姿态后,可以使用三角法计算出3D点的坐标。具体来说,通过两个不同视角的投影方程,可以建立两个线性方程组,然后解这个方程组以找出唯一的3D点。在实践中,由于噪声和匹配误差,通常采用最小二乘法或其他优化算法来估计3D点的精确位置。
总结,对极几何与三角测量是计算机视觉中的核心工具,它们使得在多个视角下重建3D环境成为可能,这对于自动驾驶、机器人导航、虚拟现实等领域的应用至关重要。理解和掌握这些理论,能帮助开发者有效地解决相机定位、立体视觉和SLAM系统中的关键问题。
对极几何与三角测量整理
对于同一相机从不同角度拍摄的两幅图像,对其进行特征提取和匹配,就得到了若干对匹配
特征;根据这些图像中二维坐标点的匹配关系,就可以恢复出两幅图像间摄像机的旋转和平
移(即位姿的变化)。这是一个 2D 点对(即 2D-2D)间的运动估计问题,通常使用对极几
何的方式得到相机相对运动的位姿。在 SLAM 实际应用中,通常被用于单目相机的初始化、
双目相机的标定等方面。
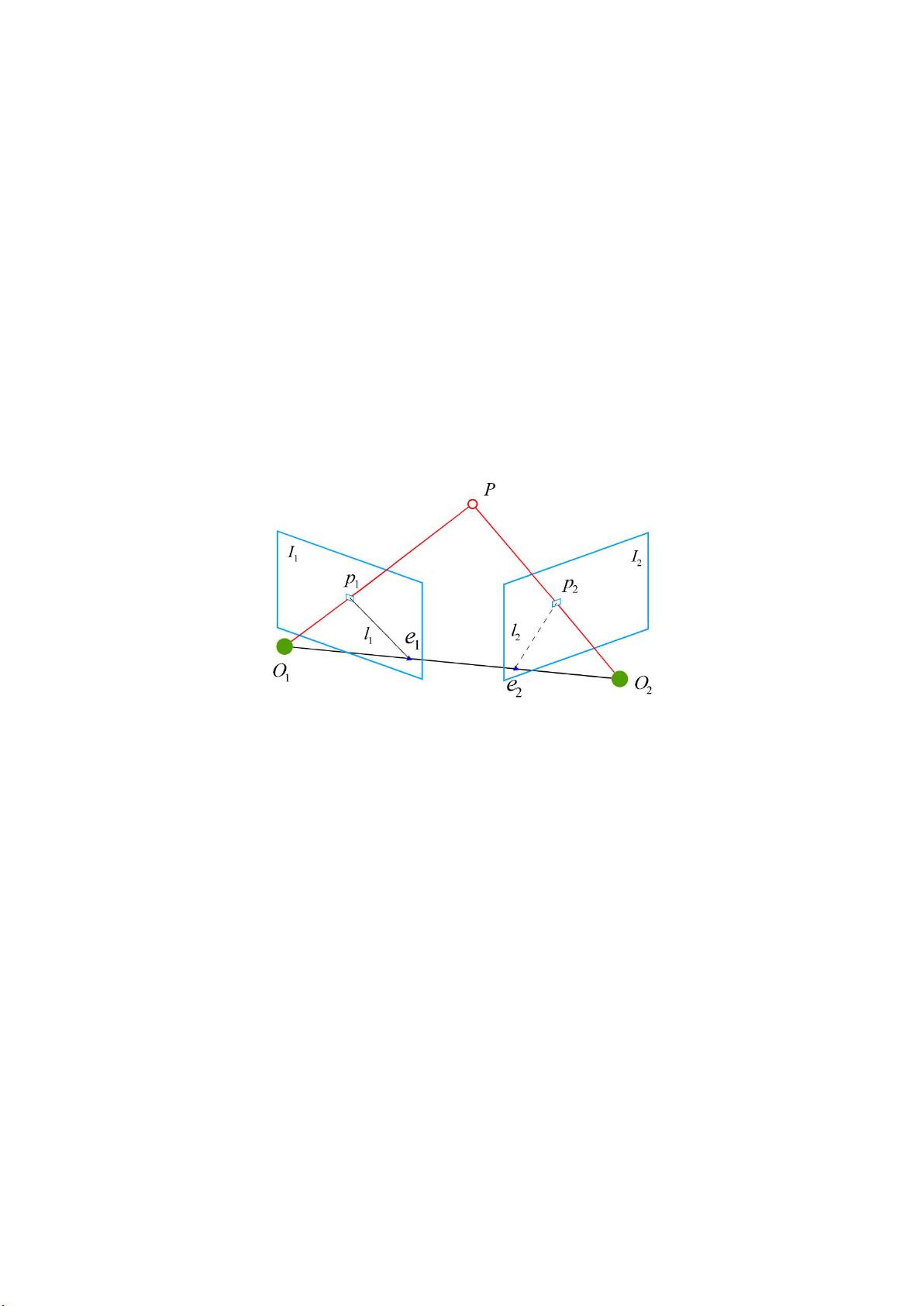
一、 基本思想
如图 1,两个视角下的摄像机光心分别为𝑶
和𝑶
,图像所在的平面分别为𝑰
和𝑰
,三维空间
中的点𝑷在两幅图像的投影分别为𝒑
和𝒑
,连接点𝑷、𝑶
和𝑶
所构成的平面为极平面
(Epipolar plane),而连线𝑶
𝑶
则称为基线(Baseline),基线与成像平面的交点𝒆
、𝒆
为极
点(Epipoles),连线𝒑
𝒆
、𝒑
𝒆
(即极平面与两个成像平面的交线)可记作𝒍
、𝒍
,称为极
线(Epipolar line)。这样的几何约束关系称为对极几何约束。
图 1 对极几何约束
我们可以通过这些点的共面关系恢复出摄像机间的相对位姿𝑹、𝒕。
而另一方面,由于极平面的存在,一幅图像中的特征的对应匹配点必然会出现在另一幅图的
对应极线中。因此,在已经确定位姿关系的两幅图像中,匹配特征不必在整幅图像中搜索对
应点,只需在对应的极线上搜索即可,这样就将二维搜索转化为一维搜索,在双目视觉 SLAM
中借助这一特性,可大大降低双目特征匹配时的计算量,同时也可提高特征匹配的准确率。
二、 基础矩阵和本征矩阵
两幅图像的位姿关系可由本征矩阵(Essencial Matrix)𝑬表述,本征矩阵仅包含二者之间的
位姿信息;而基础矩阵(Fundamental Matrix)𝑭则在位姿信息的基础上包含了摄像机的内参
数𝑲。本征矩阵在归一化的物理坐标系下操作,而基础矩阵在图像坐标系下进行操作。接下
来从数学角度对𝑬和𝑭进行推导。
2.1 本征矩阵
已知三维空间中的点𝑷=
(
𝑋,𝑌,𝑍
)
(在第一帧坐标系下),该点在两幅图像的投影分别为𝒑
和𝒑
,则有
𝑠𝒑
=𝑲𝑷
𝑠𝒑
=𝑲(𝑹𝑷 +𝒕)
取两个像素点𝒑
、𝒑
的归一化平面坐标为𝒙
和𝒙
,那么
𝒙
=𝑲
𝒑
下载后可阅读完整内容,剩余5页未读,立即下载
2021-09-09 上传
2021-10-05 上传
2021-09-09 上传
2021-09-08 上传
2021-10-05 上传
2021-10-05 上传
2021-09-09 上传
2021-09-08 上传
101 浏览量

代码深渊漫步者
- 粉丝: 21
- 资源: 320
 我的内容管理
展开
我的内容管理
展开







最新资源
- conekta-api:Conekta 的 Node.js REST 服务的完整 API
- reto-1_coach-rafael
- msf_gif:单头动画GIF导出器
- NodeJs-Jobs-Website:由NodeJs开发的Jobs网站
- 【ssm项目源码】学校教务管理系统.zip
- Knowledge_Graph_Exchange_Registry:生物医学数据转换器联盟站点,用于开发知识图交换标准和注册表
- subclass-dance-party
- Netsso LoginPilot-crx插件
- cordova-plugin-paypalmpl:用于 PayPal MPL 库的 Cordova 插件,不适用于新的 SDK
- GANPPBO:将GANSpace和投影优先贝叶斯优化技术相结合的研究项目,用于在生成的图像中对用户偏好进行建模
- MT6771 P60 _LTE-A_Smartphone_Application_Processor_Functional_Specification.rar
- 网络游戏-基于遗传算法和概率神经网络的远程摔倒检测方法及系统.zip
- fitness-tracker2
- DAB_BERTRAND_Louis_3D_TR_SCIFI:基于模块化设计的SCI FI项目是统一进行的
- jquery-canvasspinner:一个 HTML5 基于加载微调器,带有 .gif 回退
- reghdfe:具有任意数量的固定效应的线性,IV和GMM回归
